Do not want my blog posts as “anonymous”. Started by: Profile photo of Toni Toni in: How-to & Troubleshooting. 1; 1; 1 hour, 19 minutes ago.
from Google Alert - anonymous http://ift.tt/1OOMHt5
via IFTTT
Saturday, January 23, 2016
Page still accessible to anonymous users
Hi, I have created a custom permission for the path: manage/* I have given permission for this to 2 specific roles and not to anonymous. However, even ...
from Google Alert - anonymous http://ift.tt/1UjdnpG
via IFTTT
from Google Alert - anonymous http://ift.tt/1UjdnpG
via IFTTT
Anonymous Gifts Totaling $15 million Fuel Cystic Fibrosis Research at Geisel
A $10 million gift from an anonymous donor combined with a $5 million matching gift, also anonymous, will accelerate research aimed at finding better ...
from Google Alert - anonymous http://ift.tt/1ZUcPgK
via IFTTT
from Google Alert - anonymous http://ift.tt/1ZUcPgK
via IFTTT
[FD] HP LaserJet Fax Preview DLL side loading vulnerability
--------------------------------------------------------------------
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] HP ToComMsg DLL side loading vulnerability
--------------------------------------------------------------------
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] LEADTOOLS ActiveX control multiple DLL side loading vulnerabilities
--------------------------------------------------------------------
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
International Space Station Transits Saturn

From low Earth orbit to the outer Solar System, this remarkable video frame composite follows the International Space Station's transit of Saturn. On January 15, the well-timed capture from a site near Dulmen, Germany required telescope and camera to be positioned along the predicted transit centerline, a path only 40 meters wide. That put the camera about 1,140 kilometers away from the space station during the transit and 1,600,000,000 kilometers away from Saturn. A video rate of 42 frames per second follows the orbital outpost moving quickly from lower right to upper left. The transit itself lasted about 0.02 seconds, with one frame showing the station directly in front of the ringed gas giant. Of course, you could also try to capture the International Space Station as it transits Jupiter. via NASA http://ift.tt/1RYJH3C
Friday, January 22, 2016
Quand de mon cueur vous ferai part (Anonymous)
Quand de mon cueur vous ferai part (Anonymous). Add File. Add Sheet MusicAdd Your Own ArrangementAdd Your Own CompositionAdd Your Own ...
from Google Alert - anonymous http://ift.tt/1OMpZSz
via IFTTT
from Google Alert - anonymous http://ift.tt/1OMpZSz
via IFTTT
Do not want my blog posts as “anonymous”
I made a blog post, I will be the only admin and I am the only member right now – it's all my doings, it lists the post as by “anonymous”, not me. How to I ...
from Google Alert - anonymous http://ift.tt/1QqgmNO
via IFTTT
from Google Alert - anonymous http://ift.tt/1QqgmNO
via IFTTT
Approaches to anonymous feature engineering?
Hi guys! I was reading something about converting categorical variables with historic response rate or using likelihood to encode it. Do you have any ...
from Google Alert - anonymous http://ift.tt/1RYPgPx
via IFTTT
from Google Alert - anonymous http://ift.tt/1RYPgPx
via IFTTT
ISS Daily Summary Report – 01/21/16
Ocular Health: Kopra and Peake performed their Flight Day 30 Optical Coherence Tomography (OCT) to measure retinal thickness, and this afternoon conducted fundoscopy measurements to obtain images of the retinal surface. By systematically gathering physiological data to characterize the risk of microgravity-induced visual impairment/intracranial pressure in ISS crewmembers, the Ocular Health experiment will give a better understanding of visual, vascular and central nervous system changes over the course of spaceflight and post-flight recovery. Airway Monitoring: Peake and Kopra used the Airway Monitoring equipment this morning to perform Nitric Oxide (NO) measurements at ambient pressure. Peake performed a calibration and then three Fractional Expired Nitric Oxide (FENO) measurements. Kopra was able to successfully perform two of his three FENO measurements due to a kinked cable, recalibrated the system and collected three Diffuse Capacity in Lungs Nitric Oxide (DLNO) measurements. Peake completed his DLNO measurements and then powered down and stowed the Airway Monitoring equipment. Ground teams are analyzing the downlinked data of the FENO (low NO) protocol (determines how much NO is exhaled with respiration) and the DLNO (high NO) protocol (determines how much NO is diffused into the blood). The primary goals of the Airway Monitoring experiment is to determine how gravity and microgravity influence the turnover of Nitric Oxide (NO) in the lungs. During future manned missions to the Moon and to Mars, airway inflammation due to toxic dust inhalation is a risk factor. Since dust may cause airway inflammation and since such inflammation can be monitored by exhaled NO (Nitric Oxide) analysis the present study is highly relevant for astronaut health in future space programs. The next Airway Monitoring session will be scheduled at the end of February, and will utilize the reduced pressure of the Joint Airlock. Russian Segment (RS) Extravehicular Activity (EVA) Preparations: Kopra gathered and transferred US tools to the Russian Segment in preparation for RS EVA #42 currently planned for February 3. ISS Emergency Response On-Board Training (OBT): This training session was performed by both the ground and crew to practice ISS Emergency response based on information provided by a simulator. During the exercise the crew practiced required actions for two cases: a fire in Mini Research Module-2 (MRM-2) and an ammonia leak in the US segment. Following the training the crew and ground teams conducted a conference to discuss questions and comments. Commercial off the Shelf (COTS) Ultra High Frequency (UHF) Communications Unit (CUCU) Loop Back Test – Today, ground teams successfully checked out the path carrying UHF Radio Frequency (RF) signals to/from CUCU and Space to Space Station Radio (SSSR) to the UHF Antennas. The loop back test radiated from both the US Lab UHF and P1 UHF antennas to the CUCU. The test was performed to obtain baseline data prior to installation of the External Wireless Communications (EWC) internal cabling, and will be repeated post EWC cable installation. The cable installation is expected to be completed in Increment 47 Today’s Planned Activities All activities were performed unless otherwise noted. Laptop RS1(2) Reboot SLEEP – Questionnaire RSS1,2 Reboot SM ПСС (Caution & Warning Panel) Test TWIN – Urine Sample Collection HRF Blood Sample Collection and Cold Stowage PILOT-T. Experiment Ops Health Management System (HMS) – Optical Coherence Tomography (OCT) AIRMON – Experiment Ops CUCU – Activation COSMOCARD. Setup. Starting 24-hr ECG Recording Preparing for Replacement of Storage Battery Module 800А No.8 СОЖ Maintenance JRNL – Journal Entry HABIT – Experiment Ops Training for Emergency Response On-board ISS Internal Review of Training for Emergency Response On-board ISS IMS Delta File Prep Initiate EMU LLB Battery Autocycle ISS crew and MCC-M OBT Debrief Gather EVA Equipment and Tools OTKLIK. Hardware Monitoring CUCU Deactivation Health Maintenance System (HMS) Vision Test Fundoscope – Eye Exam Ocular Health Experiment Transferring US EVA Tools from the USOS to RS in preparation for RS EVA 42 Health Maintenance System (HMS) – Nutritional Assessment (ESA) Completed Task List Items None Ground Activities All activities were performed unless otherwise noted. CUCU Loopback Test Three-Day Look Ahead: Friday, 01/22: RRM Taskboard 4 Removal from JEMAL, ELF, Ocular Health, HMS Ultrasounds, Airway Monitoring Stow Saturday, 01/23: Crew Off Duty, Weekly Housekeeping Sunday, 01/24: Crew Off Duty QUICK ISS Status – Environmental Control Group: Component Status Elektron On Vozdukh Manual [СКВ] 1 – SM Air Conditioner System (“SKV1”) Off [СКВ] 2 – SM Air Conditioner System (“SKV2”) On Carbon Dioxide Removal Assembly (CDRA) Lab Operate Carbon Dioxide Removal Assembly (CDRA) Node 3 Override Major Constituent Analyzer (MCA) Lab Idle Major Constituent Analyzer (MCA) Node 3 Operate Oxygen Generation Assembly (OGA) Process Urine Processing Assembly (UPA) Standby Trace Contaminant Control System (TCCS) Lab Full Up Trace Contaminant Control System (TCCS) Node 3 Off
from ISS On-Orbit Status Report http://ift.tt/1PasPnZ
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/1PasPnZ
via IFTTT
Samsung Get Sued for Failing to Update its Smartphones
One of the world's largest smartphone makers is being sued by the Dutch Consumers' Association (DCA) for its lack in providing timely software updates to its Android smartphones. This doesn't surprise me, though. The majority of manufacturers fail to deliver software updates for old devices for years. However, the consumer protection watchdog in The Netherlands, The Dutch


from The Hacker News http://ift.tt/1ndbP5H
via IFTTT
from The Hacker News http://ift.tt/1ndbP5H
via IFTTT
anonymous-sums
anonymous-sums. Provides anonymous sum types for Haskell. Kind of like Either , but for multiple types rather than just two. This is boring and tedious ...
from Google Alert - anonymous http://ift.tt/1VdcuPr
via IFTTT
from Google Alert - anonymous http://ift.tt/1VdcuPr
via IFTTT
Google to Speed Up Chrome for Fast Internet Browsing
Google is planning to make Chrome faster in order to provide its users fast Internet browsing experience. Thanks to a new, open-source data and web compression algorithm for the Internet called Brotli, which Google announced last year to boost its web page performance. With Brotli, Google will speed up Chrome and users could get a significant performance boost in coming months.

from The Hacker News http://ift.tt/1ZQVN31
via IFTTT
from The Hacker News http://ift.tt/1ZQVN31
via IFTTT
Global Temperature Anomalies from December 2015
Earth's 2015 surface temperatures were the warmest since modern record keeping began in 1880, according to independent analyses by NASA and the National Oceanic and Atmospheric Administration (NOAA). Globally-averaged temperatures in 2015 shattered the previous mark set in 2014 by 0.23 degrees Fahrenheit (0.13 Celsius). Weather dynamics often affect regional temperatures, so not every region on Earth experienced record average temperatures last year. This data visualization of NASA's Goddard Institute for Space Studies (GISS) Global temperature anomalies for December of 2015 show the United States and then zooms out to show the global picture. Temperature anomalies indicate how much warmer or colder it is than normal for a particular place and time. For more information on the GISTEMP, see the GISTEMP analysis website located at: http://ift.tt/uAzy6c
from NASA's Scientific Visualization Studio: Most Recent Items http://ift.tt/1Ps2k9c
via IFTTT
from NASA's Scientific Visualization Studio: Most Recent Items http://ift.tt/1Ps2k9c
via IFTTT
Five-Year Global Temperature Anomalies from 1880 to 2015
Earth's 2015 surface temperatures were the warmest since modern record keeping began in 1880, according to independent analyses by NASA and the National Oceanic and Atmospheric Administration (NOAA). Globally-averaged temperatures in 2015 shattered the previous mark set in 2014 by 0.23 degrees Fahrenheit (0.13 Celsius). Only once before, in 1998, has the new record been greater than the old record by this much. The 2015 temperatures continue a long-term warming trend, according to analyses by scientists at NASA's Goddard Institute for Space Studies (GISS) in New York (GISTEMP). NOAA scientists agreed with the finding that 2015 was the warmest year on record based on separate, independent analyses of the data. Because weather station locations and measurements change over time, there is some uncertainty in the individual values in the GISTEMP index. Taking this into account, NASA analysis estimates 2015 was the warmest year with 94 percent certainty. "Climate change is the challenge of our generation, and NASA's vital work on this important issue affects every person on Earth," said NASA Administrator Charles Bolden. "Today's announcement not only underscores how critical NASA's Earth observation program is, it is a key data point that should make policy makers stand up and take notice - now is the time to act on climate." The planet's average surface temperature has risen about 1.8 degrees Fahrenheit (1.0 degree Celsius) since the late-19th century, a change largely driven by increased carbon dioxide and other human-made emissions into the atmosphere. Most of the warming occurred in the past 35 years, with 15 of the 16 warmest years on record occurring since 2001. Last year was the first time the global average temperatures were 1 degree Celsius or more above the 1880-1899 average. Phenomena such as El Nino or La Nina, which warm or cool the tropical Pacific Ocean, can contribute to short-term variations in global average temperature. A warming El Nino was in effect for most of 2015. "2015 was remarkable even in the context of the ongoing El Nino," said GISS Director Gavin Schmidt. "Last year's temperatures had an assist from El Nino, but it is the cumulative effect of the long-term trend that has resulted in the record warming that we are seeing." Weather dynamics often affect regional temperatures, so not every region on Earth experienced record average temperatures last year. For example, NASA and NOAA found that the 2015 annual mean temperature for the contiguous 48 United States was the second warmest on record. The GISTEMP analysis website is located at: http://ift.tt/uAzy6c
from NASA's Scientific Visualization Studio: Most Recent Items http://ift.tt/1Jnnc5m
via IFTTT
from NASA's Scientific Visualization Studio: Most Recent Items http://ift.tt/1Jnnc5m
via IFTTT
The View Toward M101

Sweeping through northern skies, Comet Catalina (C/2013 US10) made its closest approach on January 17, passing about 6 light-minutes from our fair planet. Dust and ion tails clearly separated in this Earth-based view, the comet is also posed for a Messier moment, near the line-of-sight to M101, grand spiral galaxy in Ursa Major. A cosmic pinwheel at the lower left, M101 is nearly twice the size of our own Milky Way galaxy, but some 270 thousand light-centuries away. Both galaxy and comet are relatively bright, easy targets for binocular-equipped skygazers. But Comet Catalina is now outbound from the inner Solar System and will slowly fade in coming months. This telescopic two panel mosaic spans about 5 degrees (10 Full Moons) on the sky. via NASA http://ift.tt/1Jksn6d
Thursday, January 21, 2016
Anonymous Feedback possible without guest login?
Yes, there are a couple of other steps. Go into permissions for the feedback and make sure that guest and authenticated user are both selected to ...
from Google Alert - anonymous http://ift.tt/1ZFX3kd
via IFTTT
from Google Alert - anonymous http://ift.tt/1ZFX3kd
via IFTTT
Anonymous taking action on Flint water crisis
The international hacking group known as Anonymous is taking on the Flint water crisis.In a video posted on Youtube the group blames the ...
from Google Alert - anonymous http://ift.tt/1OAHlUy
via IFTTT
from Google Alert - anonymous http://ift.tt/1OAHlUy
via IFTTT
Anonymous Access to Remote API
Administrators may wish to disable anonymous access to the Confluence remote API. to make it harder for malicious users to write 'bots' that perform ...
from Google Alert - anonymous http://ift.tt/1RXfoui
via IFTTT
from Google Alert - anonymous http://ift.tt/1RXfoui
via IFTTT
Neural Enquirer: Learning to Query Tables with Natural Language. (arXiv:1512.00965v2 [cs.AI] UPDATED)
We proposed Neural Enquirer as a neural network architecture to execute a natural language (NL) query on a knowledge-base (KB) for answers. Basically, Neural Enquirer finds the distributed representation of a query and then executes it on knowledge-base tables to obtain the answer as one of the values in the tables. Unlike similar efforts in end-to-end training of semantic parsers, Neural Enquirer is fully "neuralized": it not only gives distributional representation of the query and the knowledge-base, but also realizes the execution of compositional queries as a series of differentiable operations, with intermediate results (consisting of annotations of the tables at different levels) saved on multiple layers of memory. Neural Enquirer can be trained with gradient descent, with which not only the parameters of the controlling components and semantic parsing component, but also the embeddings of the tables and query words can be learned from scratch. The training can be done in an end-to-end fashion, but it can take stronger guidance, e.g., the step-by-step supervision for complicated queries, and benefit from it. Neural Enquirer is one step towards building neural network systems which seek to understand language by executing it on real-world. Our experiments show that Neural Enquirer can learn to execute fairly complicated NL queries on tables with rich structures.
from cs.AI updates on arXiv.org http://ift.tt/1jC8VFq
via IFTTT
FullCalendar not displaying color bands for anonymous
Have upgraded Rooms to 1.8 version, with FullCalendar and Moment libraries installed successfully. Calendars are still displaying and admin view is ...
from Google Alert - anonymous http://ift.tt/1OABXkh
via IFTTT
from Google Alert - anonymous http://ift.tt/1OABXkh
via IFTTT
Anonymous threats made against police in Philadelphia, NYC
Anonymous threats made against police in Philadelphia, NYC. Jan. 21, 2016 - 1:53 - Terror threats have police in both cities on high alert.
from Google Alert - anonymous http://ift.tt/1PragYf
via IFTTT
from Google Alert - anonymous http://ift.tt/1PragYf
via IFTTT
You Wouldn't Believe that Too Many People Still Use Terrible Passwords
Some things online can never change like -- Terrible Passwords by Humans. When it's about various security measures to be taken in order to protect your Internet security, like installing a good anti-virus or running Linux on your system doesn’t mean that your work gets over here, and you are safe enough from online threats. However, even after countless warnings, most people are

from The Hacker News http://ift.tt/1ZEquTC
via IFTTT
from The Hacker News http://ift.tt/1ZEquTC
via IFTTT
ISS Daily Summary Report – 01/20/16
Cardio Ox: Kelly performed his Flight Day 300 (FD300) Cardio Ox ultrasound and blood pressure measurement session with Peake acting as operator. Throughout the day today, Kelly collected urine samples that will be used by the Cardio Ox and Twins Studies. Tomorrow, he will collect blood samples and store them in Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) until their return to ground for laboratory analysis. The goal of Cardio Ox is to determine whether biological markers of oxidative and inflammatory stress are elevated during and after space flight and whether this results in an increased, long-term risk of atherosclerosis risk in astronauts. Twelve crewmembers provide blood and urine samples to assess biomarkers before launch, 15, and 60 after launch, 15 days before returning to Earth, and within days after landing. Ultrasound scans of the carotid and brachial arteries are obtained at the same time points, as well as through 5 years after landing, as an indicator of cardiovascular health. Airway Monitoring: Peake configured equipment in the Lab for the Ambient Pressure monitoring session of the Airway Monitoring Experiment. Peake changed out the sensor for both the Low and High Nitric Oxide (NO) Analyzers. He then configured camera views and activated the Portable Pulmonary Function System (PPFS) prior to a software update performed by ground teams. The primary goals of the Airway Monitoring experiment is to determine how gravity and microgravity influence the turnover of NO in the lungs. During future manned missions to the Moon and to Mars, airway inflammation due to toxic dust inhalation is a risk factor. Since dust may cause airway inflammation and since such inflammation can be monitored by exhaled NO analysis the present study is highly relevant for astronaut health in future space programs. Ocular Health: This week Kopra and Peake are performing their FD30 Ocular Health activities. Today, the crew performed tonometry to measure intraocular pressure, blood pressure measurements, vision tests and a vision questionnaire. The Ocular Health protocol calls for a systematic gathering of physiological data to characterize the risk of microgravity-induced visual impairment/intracranial pressure in ISS crewmembers. Researchers believe that the measurement of visual, vascular and central nervous system changes over the course of this experiment and during the subsequent post-flight recovery will assist in the development of countermeasures, clinical monitoring strategies, and clinical practice guidelines. Extravehicular Mobility Unit (EMU) Loop Scrub: Kopra configured EMU suits 3008 and 3011 for loop scrubbing. During EMU 3011 loop scrub, a leak was observed at the Liquid Cooling and Ventilation Garment (LCVG) to water processing jumper connector. Photographs of the leak were taken and the area dried. An attempt to recreate the leak during iodination was unsuccessful. After the scrubbing activity was completed, he reconfigured hardware and performed Iodination of Ion Filters for both suits. Finally he performed a dryout of the EMU Fan Module and Vent Loop. Samples containing 250 mL of the water were obtained after the loop scrub activity to determine the effectiveness of the filtering. 10 mL of this water sample will be used for a conductivity test on Friday onboard ISS and the remaining water will be sent to the ground for chemical analysis. Nitrogen Oxygen Recharge System (NORS) Oxygen Transfer: The NORS Oxygen transfer to the high pressure O2 tanks was successfully completed yesterday. Early this morning, the ground teams commanded the NORS Oxygen transfer to the low pressure O2 tanks. Transfer to the low pressure tanks is complete and the crew has closed the transfer valve. Today’s Planned Activities All activities were completed unless otherwise noted. Laptop RS1(2) Reboot SLEEP – Questionnaire SM ПСС (Caution & Warning Panel) Test TWIN – Urine Sample Collection МО-8. Configuration Setup Body Mass Measurement HRF – Sample Insertion into MELFI Nitrogen Oxygen Recharge System (NORS) – Oxygen Transfer to Low Pressure O2 Tank Fine Motor Skills Soyuz 718 Samsung Tablet Recharge Eye Test (Ocular Health) – Blood Pressure Operations CRHYT – Hardware Removal HAM radio session from Columbus HMS Visual Testing Activity BIOCARD. Experiment Ops. Health Maintenance System (HMS) – Tonometry Test Configuration Eye Imaging (Ocular Health) Window Observational Research Facility (WORF) – Cable Installation Preparation of spacesuit replaceable elements, service and personal gear. USND2 CARDOX Airway Monitoring (AIRMON) EMU cooling loop scrub RADIN – Handover of Detectors to RS MATRYOSHKA-R. Handover of BUBBLE-dosimeters from USOS HRF Blood Collection RS ПН28-120Power Converter Checkout. ПхО and DC1 config for EVA 42 EMU Cooling Loop H2O Sample PAO Event with the 1 Year Mission crew Inspection and Cleaning of Laptops RS2, RS3 IPAD Configuration for Dose Tracker VEG-01 HABIT RS1 Laptop Inspection and Cleaning. JRNL – Journal Entry INTERACTION-2. Experiment Ops IPAD Configuration for Dose Tracker Health Maintenance System (HMS) – Nutritional Assessment (ESA) СОЖ Maintenance EMU – Long Dryout ISS Emergency OBT Review COGNITION Completed Task List Items WHC KTO Replace Ground Activities All activities were completed unless otherwise noted. TRRJ Survey, Nominal System Commanding Three-Day Look Ahead: Thursday, 01/21: ISS Emergency Training, Fundoscope, Airway Monitoring Friday, 01/22: RRM Taskboard 4 Removal from JEMAL, ELF, OcularHealth, HMS Ultrasounds, Airway Monitoring Stow Saturday, 01/23: Crew Off Duty, Weekly Housekeeping QUICK ISS Status – Environmental Control Group: Component Status Elektron On Vozdukh Manual [СКВ] 1 – SM Air Conditioner System (“SKV1”) On [СКВ] 2 – SM Air Conditioner System (“SKV2”) Off Carbon Dioxide Removal Assembly (CDRA) Lab Operate Carbon Dioxide Removal Assembly (CDRA) Node 3 Override Major Constituent Analyzer (MCA) Lab Idle Major Constituent Analyzer (MCA) Node 3 Operate Oxygen Generation Assembly (OGA) Process Urine Processing Assembly (UPA) Standby Trace Contaminant Control System (TCCS) Lab Full Up Trace Contaminant Control System (TCCS) Node 3 Off
from ISS On-Orbit Status Report http://ift.tt/1OzmyAD
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/1OzmyAD
via IFTTT
Free Screening of The Anonymous People and Panel Discussion
Free Movie Screening of The Anonymous People Doors open @ 6:30pm with info on addiction and recovery. Movie begins at 7pm. Panel Discussion ...
from Google Alert - anonymous http://ift.tt/1nAk0cx
via IFTTT
from Google Alert - anonymous http://ift.tt/1nAk0cx
via IFTTT
Ravens: Joe Flacco tells WBAL Radio his salary ($28.55M) is \"a huge number\"; open to restructuring deal for cap relief (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
Anonymous threats made against police in Philadelphia, NYC
Terror threats have police in both cities on high alert.
from Google Alert - anonymous http://ift.tt/1Szmxk8
via IFTTT
from Google Alert - anonymous http://ift.tt/1Szmxk8
via IFTTT
[FD] SEC Consult SA-20160121-0 :: Deliberately hidden backdoor account in AMX (Harman Professional) devices
Disclaimer: Although the backdoor vulnerability is quite a serious matter, we have published an accompanying blog post to this technical advisory which sheds a more funny light on this topic. Visit our blog at http://ift.tt/1VaxJkR for more information. SEC Consult Vulnerability Lab Security Advisory < 20160121-0 > ======================================================================= title: Deliberately hidden backdoor account product: Several AMX (HARMAN Professional) devices, see section "Vulnerable / tested versions" vulnerable version: v1.2.322, v1.3.100 for AMX NX-1200, multiple other products fixed version: untested hotfix and firmware updates available CVE number: CVE-2015-8362 impact: critical homepage: http://www.amx.com found: 2015-03-10 by: Matthias Klinski, Manuel Hofer (Office Vienna) SEC Consult Vulnerability Lab An integrated part of SEC Consult Berlin - Frankfurt/Main - Montreal - Moscow Singapore - Vienna (HQ) - Vilnius - Zurich http://ift.tt/1mGHMNR ======================================================================= Vendor description:
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
Ocean City, MD's surf is at least 6.07ft high
Maryland-Delaware, January 25, 2016 at 02:00AM
Ocean City, MD Summary
At 2:00 AM, surf min of 6.07ft. At 8:00 AM, surf min of 5.1ft. At 2:00 PM, surf min of 3.79ft. At 8:00 PM, surf min of 2.8ft.
Surf maximum: 7.08ft (2.16m)
Surf minimum: 6.07ft (1.85m)
Tide height: -0.65ft (-0.2m)
Wind direction: NW
Wind speed: 11.47 KTS
from Surfline http://ift.tt/1kVmigH
via IFTTT
Ocean City, MD Summary
At 2:00 AM, surf min of 6.07ft. At 8:00 AM, surf min of 5.1ft. At 2:00 PM, surf min of 3.79ft. At 8:00 PM, surf min of 2.8ft.
Surf maximum: 7.08ft (2.16m)
Surf minimum: 6.07ft (1.85m)
Tide height: -0.65ft (-0.2m)
Wind direction: NW
Wind speed: 11.47 KTS
from Surfline http://ift.tt/1kVmigH
via IFTTT
Apple testing Ultra-Fast Li-Fi Wireless Technology for Future iPhones
Apple to make future iPhones compatible with a cutting-edge technology that has the capability to transmit data at 100 times the speed of WiFi, suggests the code found within the iOS firmware. Apple may ship future iPhones with Li-Fi capabilities, a new technology that may end up replacing the widely-used Wi-Fi in the future technology. Beginning with iOS 9.1 update, the operating

from The Hacker News http://ift.tt/1RUTSGw
via IFTTT
from The Hacker News http://ift.tt/1RUTSGw
via IFTTT
Critical iOS Flaw allowed Hackers to Steal Cookies from Devices
Apple has patched a critical vulnerability in its iOS operating system that allowed criminal hackers to impersonate end users' identities by granting read/write access to website's unencrypted authentication cookies. The vulnerability was fixed with the release of iOS 9.2.1 on Tuesday, almost three years after it was first discovered and reported to Apple. <!-- adsense --> The

from The Hacker News http://ift.tt/1SyQ3q1
via IFTTT
from The Hacker News http://ift.tt/1SyQ3q1
via IFTTT
An Anonymous Donor Helps IEEE Bring Tech History to Life in the Classroom
The money is being used to create free videos and other resources for high school teachers.
from Google Alert - anonymous http://ift.tt/1P7llC6
via IFTTT
from Google Alert - anonymous http://ift.tt/1P7llC6
via IFTTT
Stars and Globules in the Running Chicken Nebula

The eggs from this gigantic chicken may form into stars. The featured emission nebula, shown in scientifically assigned colors, is cataloged as IC 2944 but known as the Running Chicken Nebula for the shape of its greater appearance. Seen toward the top of the image are small, dark molecular clouds rich in obscuring cosmic dust. Called Thackeray's Globules for their discoverer, these "eggs" are potential sites for the gravitational condensation of new stars, although their fates are uncertain as they are also being rapidly eroded away by the intense radiation from nearby young stars. Together with patchy glowing gas and complex regions of reflecting dust, these massive and energetic stars form the open cluster Collinder 249. This gorgeous skyscape spans about 60 light-years at the nebula's estimated 6,000 light-year distance. via NASA http://ift.tt/1JY6edP
Wednesday, January 20, 2016
I have a new follower on Twitter
Jakub Wachocki
Information Mngmt / BIM Consultant. Digital transformation and process automation advocate. Lecturer. Adventurer. #ukBIMcrew #globalBIMcrew #Innovation Angel
London
https://t.co/ruk4udWTGu
Following: 2335 - Followers: 2637
January 20, 2016 at 11:37PM via Twitter http://twitter.com/_JakubW
The DARPA Twitter Bot Challenge. (arXiv:1601.05140v1 [cs.SI])
A number of organizations ranging from terrorist groups such as ISIS to politicians and nation states reportedly conduct explicit campaigns to influence opinion on social media, posing a risk to democratic processes. There is thus a growing need to identify and eliminate "influence bots" - realistic, automated identities that illicitly shape discussion on sites like Twitter and Facebook - before they get too influential. Spurred by such events, DARPA held a 4-week competition in February/March 2015 in which multiple teams supported by the DARPA Social Media in Strategic Communications program competed to identify a set of previously identified "influence bots" serving as ground truth on a specific topic within Twitter. Past work regarding influence bots often has difficulty supporting claims about accuracy, since there is limited ground truth (though some exceptions do exist [3,7]). However, with the exception of [3], no past work has looked specifically at identifying influence bots on a specific topic. This paper describes the DARPA Challenge and describes the methods used by the three top-ranked teams.
from cs.AI updates on arXiv.org http://ift.tt/1nz0wFb
via IFTTT
Semantic Word Clusters Using Signed Normalized Graph Cuts. (arXiv:1601.05403v1 [cs.CL])
Vector space representations of words capture many aspects of word similarity, but such methods tend to make vector spaces in which antonyms (as well as synonyms) are close to each other. We present a new signed spectral normalized graph cut algorithm, signed clustering, that overlays existing thesauri upon distributionally derived vector representations of words, so that antonym relationships between word pairs are represented by negative weights. Our signed clustering algorithm produces clusters of words which simultaneously capture distributional and synonym relations. We evaluate these clusters against the SimLex-999 dataset (Hill et al.,2014) of human judgments of word pair similarities, and also show the benefit of using our clusters to predict the sentiment of a given text.
from cs.AI updates on arXiv.org http://ift.tt/1OxOnZZ
via IFTTT
Unsupervised Learning of Visual Structure using Predictive Generative Networks. (arXiv:1511.06380v2 [cs.LG] UPDATED)
The ability to predict future states of the environment is a central pillar of intelligence. At its core, effective prediction requires an internal model of the world and an understanding of the rules by which the world changes. Here, we explore the internal models developed by deep neural networks trained using a loss based on predicting future frames in synthetic video sequences, using a CNN-LSTM-deCNN framework. We first show that this architecture can achieve excellent performance in visual sequence prediction tasks, including state-of-the-art performance in a standard 'bouncing balls' dataset (Sutskever et al., 2009). Using a weighted mean-squared error and adversarial loss (Goodfellow et al., 2014), the same architecture successfully extrapolates out-of-the-plane rotations of computer-generated faces. Furthermore, despite being trained end-to-end to predict only pixel-level information, our Predictive Generative Networks learn a representation of the latent structure of the underlying three-dimensional objects themselves. Importantly, we find that this representation is naturally tolerant to object transformations, and generalizes well to new tasks, such as classification of static images. Similar models trained solely with a reconstruction loss fail to generalize as effectively. We argue that prediction can serve as a powerful unsupervised loss for learning rich internal representations of high-level object features.
from cs.AI updates on arXiv.org http://ift.tt/1MwAg69
via IFTTT
How to Discount Deep Reinforcement Learning: Towards New Dynamic Strategies. (arXiv:1512.02011v2 [cs.LG] UPDATED)
Using deep neural nets as function approximator for reinforcement learning tasks have recently been shown to be very powerful for solving problems approaching real-world complexity. Using these results as a benchmark, we discuss the role that the discount factor may play in the quality of the learning process of a deep Q-network (DQN). When the discount factor progressively increases up to its final value, we empirically show that it is possible to significantly reduce the number of learning steps. When used in conjunction with a varying learning rate, we empirically show that it outperforms original DQN on several experiments. We relate this phenomenon with the instabilities of neural networks when they are used in an approximate Dynamic Programming setting. We also describe the possibility to fall within a local optimum during the learning process, thus connecting our discussion with the exploration/exploitation dilemma.
from cs.AI updates on arXiv.org http://ift.tt/1OMntPK
via IFTTT
Origami: A 803 GOp/s/W Convolutional Network Accelerator. (arXiv:1512.04295v2 [cs.CV] UPDATED)
An ever increasing number of computer vision and image/video processing challenges are being approached using deep convolutional neural networks, obtaining state-of-the-art results in object recognition and detection, semantic segmentation, action recognition, optical flow and superresolution. Hardware acceleration of these algorithms is essential to adopt these improvements in embedded and mobile computer vision systems. We present a new architecture, design and implementation as well as the first reported silicon measurements of such an accelerator, outperforming previous work in terms of power-, area- and I/O-efficiency. The manufactured device provides up to 196 GOp/s on 3.09 mm^2 of silicon in UMC 65nm technology and can achieve a power efficiency of 803 GOp/s/W. The massively reduced bandwidth requirements make it the first architecture scalable to TOp/s performance.
from cs.AI updates on arXiv.org http://ift.tt/1NtM9YW
via IFTTT
Methuen High School Evacuated After Anonymous Email Threat
Police are investigating an email threat that caused an evacuation at Methuen High School Wednesday morning, WBZ-TV's Ken MacLeod reports.
from Google Alert - anonymous http://ift.tt/1Sy0D0y
via IFTTT
from Google Alert - anonymous http://ift.tt/1Sy0D0y
via IFTTT
St. Mark's Bookshop receives support from anonymous investor, temporarily avoids closure
An investor responded to the bookstore's latest financial appeal on GoFundMe. He will take over the store's lease and pay the back rent of $62,000, ...
from Google Alert - anonymous http://ift.tt/1OH4kLu
via IFTTT
from Google Alert - anonymous http://ift.tt/1OH4kLu
via IFTTT
I have a new follower on Twitter
Codementor
Live 1:1 help for software development. In case we miss your message, email us at support[at]codementor.io
https://t.co/fGkcBsfQJ4
Following: 5538 - Followers: 6147
January 20, 2016 at 03:16PM via Twitter http://twitter.com/CodementorIO
Ravens Video: Ex-Baltimore RB Ray Rice describes his time away from football, still \"hopeful\" for 2nd chance in NFL (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
[FD] LiteSpeed Web Server - Security Advisory - HTTP Header Injection Vulnerability
Information
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] mobile.facebook.com is not on HSTS preload list or sending the Strict-Transport-Security header
Hi All, I've noticed that mobile.facebook.com domain is not on HSTS preload list or sending the Strict-Transport-Security header. All the others domains like m.facebook.com is using HSTS properly. I reported this to Facebook on 12/3/15 through the whitehat program and got the answer below. I've checked again today and it still not using HSTS. Not sure why Facebook is not protecting this domain with HSTS. Hi Ricardo, Thank you for sharing this information with us. Although this issue does not qualify as a part of our bounty program we appreciate your report. We will follow up with you on any security bugs or with any further questions we may have. Thanks, Angelo Security Facebook
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
SAVE THE DATE! 2017 Spring Retreat
SAVE THE DATE! 2017 BRIG-sponsored Spring Retreat April 21-23, 2017 at Jesuit Spirituality Center in Grand Couteau, LA. Fees for the weekend ...
from Google Alert - anonymous http://ift.tt/1nyhKCI
via IFTTT
from Google Alert - anonymous http://ift.tt/1nyhKCI
via IFTTT
ISS Daily Summary Report – 01/19/16
Electrostatic Levitation Furnace (ELF) Setup: Kopra and Peake completed the setup of the Japan Aerospace Exploration Agency (JAXA) ELF equipment and installation into the Multi-purpose Small Payload Rack 2 (MSPR2) work volume in the Japanese Experiment Module (JEM). Later this week crewmembers will continue the setup and next week will install a sample cartridge and checkout the equipment. The ELF is an experimental facility designed to levitate, melt and solidify materials employing containerless processing techniques that use the electrostatic levitation method with charged samples and electrodes. With this facility, thermophysical properties of high temperature melts can be measured and solidification from deeply undercooled melts can be achieved. SOLAR: Measurements continued to be taken for European Space Agency’s (ESA’s) SOLAR investigation during the current sun visibility window, which is open from January 11th to January 22nd. The goal of the SOLAR instruments is to measure solar spectral irradiance and variability. Nitrogen/Oxygen Recharge System (NORS) Setup and Oxygen Transfer: Kopra set up and configured a NORS Oxygen Recharge Tank and initiated the first transfer of oxygen to the US Airlock High Pressure Gas Tanks (HPGTs) using this new capability. NORS provides the capability to refill the HPGTs with nitrogen and oxygen following Shuttle retirement. Post-Extravehicular Activity (EVA) Activities: Today, Kopra configured the US Airlock following EVA operations and prepared Extravehicular Mobility Units (EMUs) and equipment for stowage. Crew Quarters Baseplate Ballast Assembly (BBA) Replacement: Kopra replaced the BBA in the starboard Crew Quarters that failed on Sunday night. The BBA is a component of the General Luminaire Assembly (GLA), which provides illumination inside the Crew Quarters. The replacement restored lighting to the Crew Quarters. Node 3 Carbon Dioxide Removal Assembly (CDRA) Fault: Overnight, the Node 3 (N3) CDRA indicated a fault. Preliminary data review suggested a Fan Motor Controller (FMC) to Hub Control Zone (HCZ) Multiplexer/Demultiplexer (MDM) communication issue. All other CDRA hardware data was nominal up to that point. During the day, the N3 CDRA FMC did not respond to multiple attempts to restart. The Lab CDRA and the Russian carbon dioxide removal equipment (Vozdukh) are currently up and running. ISS is in a good configuration for removing carbon dioxide. Ground teams continue to assess the fault signatures. Today’s Planned Activities All activities were completed unless otherwise noted. Laptop RS1(2) Reboot SLEEP – Questionnaire SM Caution & Warning Panel (ПСС) Test [ВКС] Laptops Antivirus software checkout and report PILOT-T. Experiment Prep Video Footage for Nauka 2.0 TV Channel Fine Motor Skills. Examination Ops ELF Components Gathering XF305 Camcorder Setup MSPR2 Work Bench Setup PILOT-T. Experiment Ops. ELF Camcorder Setup SEYSMOPROGNOZ PILOT-T. Closeout Ops ИП-1 Flow Sensor Position Check СОЖ Maintenance РСПИ (Data Transmission Radio Link) DAN. Experiment Ops MSPR Ops HD Camcorder 2 Activation in HD Mode Ice Bricks Restow to Original Location in Double Coldbag Hardware Setup for a PAO Event Atmosphere Control and Supply (ACS). Nitrogen and Oxygen Resupply System (NORS). Oxygen Transfer IPAD Reconfig for Dose Tracker Water Recovery Management (WRM). Condensate Pumping (start) HABIT. Documentation of the Examination Results. EVA Hardware and Tools Search ARED. Cylinder Flywheel Evacuation Preparation of materials for Roscosmos press center re EVA-42 [Aborted – to be rescheduled to allow RS additional crewmember participation] Switching the HD Camcorder 2 to SD mode HABIT. Questionnaire Water Recovery Management (WRM). Condensate Pumping Hardware Transfer to Airlock after US EVA Delta File Prep CONTENT. Experiment Ops Checkout of P/TV camcorder setup HMS. Nutritional Assessment (ESA) Still Cameras Reconfig for EVA TWIN. Urine Sample Collection Regeneration of EMU purification cartridge BSA Battery Maintenance ARED Exercise Video Hardware Restow VZAIMODEISTVIE-2. Experiment Ops Completed Task List Items None Ground Activities All activities were completed unless otherwise noted. Configuring ISS for NORS operations Three-Day Look Ahead: Wednesday, 01/20: EMU Loop Scrubs, Airway Monitoring, Cardox, Twin Study Thursday, 01/21: ISS Emergency Training, Fundoscope, Airway Monitoring Friday, 01/22: RRM Taskboard 4 Removal from JEMAL, ELF, OcularHealth, HMS Ultrasounds, Airway Monitoring Stow Component Status Elektron On Vozdukh Manual [СКВ] 1 – SM Air Conditioner System (“SKV1”) On [СКВ] 2 – SM Air Conditioner System (“SKV2”) Off Carbon Dioxide Removal Assembly (CDRA) Lab Operate Carbon Dioxide Removal Assembly (CDRA) Node 3 Override Major Constituent Analyzer (MCA) Lab Idle Major Constituent Analyzer (MCA) Node 3 Operate Oxygen Generation Assembly (OGA) Process Urine Processing Assembly (UPA) Standby Trace Contaminant Control System (TCCS) Lab Full Up Trace Contaminant Control System (TCCS) Node 3 Off
from ISS On-Orbit Status Report http://ift.tt/1nlWHUa
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/1nlWHUa
via IFTTT
US releases Iranian Hacker as part of Prisoner Exchange Program
The United States has freed 4 Iranian nationals (including one Hacker) and reduced the sentences of 3 others in exchange for the release of 5 Americans formerly held by Iran as part of a prisoner swap or Prisoner Exchange Program. The Iranian citizens released from the United States custody through a side deal to the Iran nuclear agreement. Iran released five Americans, including:

from The Hacker News http://ift.tt/1OFn3XR
via IFTTT
from The Hacker News http://ift.tt/1OFn3XR
via IFTTT
A Dark Sand Dune on Mars
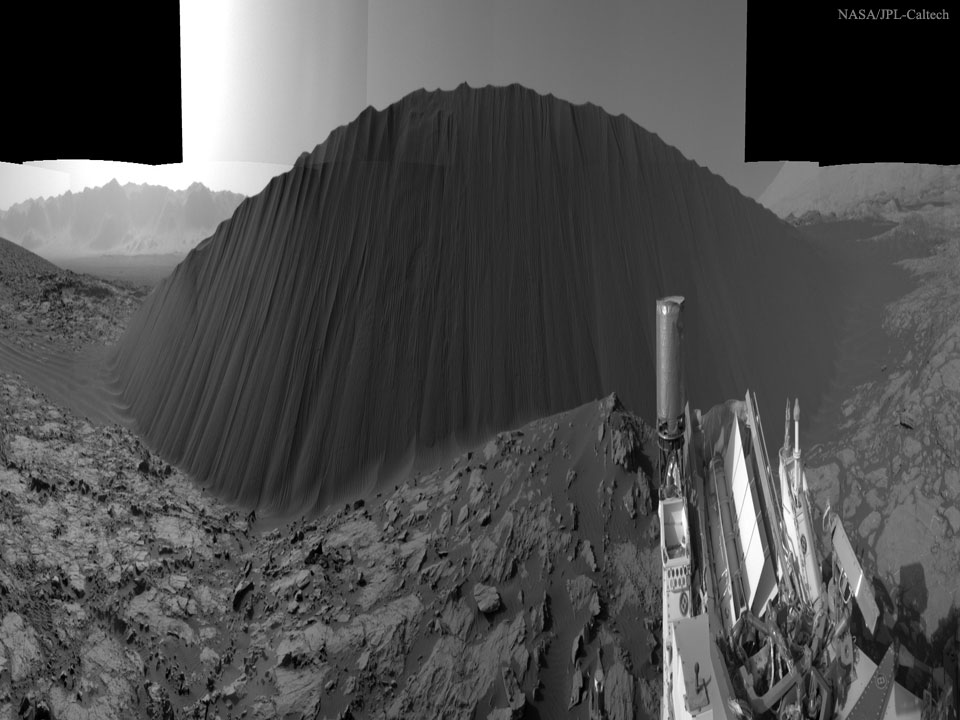
What is that dark sand dune doing on Mars? NASA's robotic rover Curiosity has been studying it to find out, making this the first-ever up-close investigation of an active sand dune on another world. Named Namib Dune, the dark sand mound stands about 4 meters tall and, along with the other Bagnold Dunes, is located on the northwestern flank of Mount Sharp. The featured image was taken last month and horizontally compressed here for comprehensibility. Wind is causing the dune to advance about one meter a year across the light bedrock underneath, and wind-blown sand is visible on the left. Part of the Curiosity rover itself is visible on the lower right. Just in the past few days, Curiosity scooped up some of the dark sand for a detailed analysis. After further exploration of the Bagnold Dunes, Curiosity is scheduled to continue its trek up the 5-kilometer tall Mount Sharp, the central peak in the large crater where the car-sized rover landed. via NASA http://ift.tt/1StRLce
Tuesday, January 19, 2016
Top-N Recommender System via Matrix Completion. (arXiv:1601.04800v1 [cs.IR])
Top-N recommender systems have been investigated widely both in industry and academia. However, the recommendation quality is far from satisfactory. In this paper, we propose a simple yet promising algorithm. We fill the user-item matrix based on a low-rank assumption and simultaneously keep the original information. To do that, a nonconvex rank relaxation rather than the nuclear norm is adopted to provide a better rank approximation and an efficient optimization strategy is designed. A comprehensive set of experiments on real datasets demonstrates that our method pushes the accuracy of Top-N recommendation to a new level.
from cs.AI updates on arXiv.org http://ift.tt/1PE0zpW
via IFTTT
Graded Entailment for Compositional Distributional Semantics. (arXiv:1601.04908v1 [cs.CL])
The categorical compositional distributional model of natural language provides a conceptually motivated procedure to compute the meaning of sentences, given grammatical structure and the meanings of its words. This approach has outperformed other models in mainstream empirical language processing tasks. However, until now it has lacked the crucial feature of lexical entailment -- as do other distributional models of meaning.
In this paper we solve the problem of entailment for categorical compositional distributional semantics. Taking advantage of the abstract categorical framework allows us to vary our choice of model. This enables the introduction of a notion of entailment, exploiting ideas from the categorical semantics of partial knowledge in quantum computation.
The new model of language uses density matrices, on which we introduce a novel robust graded order capturing the entailment strength between concepts. This graded measure emerges from a general framework for approximate entailment, induced by any commutative monoid. Quantum logic embeds in our graded order.
Our main theorem shows that entailment strength lifts compositionally to the sentence level, giving a lower bound on sentence entailment. We describe the essential properties of graded entailment such as continuity, and provide a procedure for calculating entailment strength.
from cs.AI updates on arXiv.org http://ift.tt/1P4hMN7
via IFTTT
Semantics for probabilistic programming: higher-order functions, continuous distributions, and soft constraints. (arXiv:1601.04943v1 [cs.PL])
We study the semantic foundation of expressive probabilistic programming languages, that support higher-order functions, continuous distributions, and soft constraints (such as Anglican, Church, and Venture). We define a metalanguage (an idealised version of Anglican) for probabilistic computation with the above features, develop both operational and denotational semantics, and prove soundness, adequacy, and termination. They involve measure theory, stochastic labelled transition systems, and functor categories, but admit intuitive computational readings, one of which views sampled random variables as dynamically allocated read-only variables. We apply our semantics to validate nontrivial equations underlying the correctness of certain compiler optimisations and inference algorithms such as sequential Monte Carlo simulation. The language enables defining probability distributions on higher-order functions, and we study their properties.
from cs.AI updates on arXiv.org http://ift.tt/1ltdYJ2
via IFTTT
Sample Complexity of Episodic Fixed-Horizon Reinforcement Learning. (arXiv:1510.08906v2 [stat.ML] UPDATED)
Recently, there has been significant progress in understanding reinforcement learning in discounted infinite-horizon Markov decision processes (MDPs) by deriving tight sample complexity bounds. However, in many real-world applications, an interactive learning agent operates for a fixed or bounded period of time, for example tutoring students for exams or handling customer service requests. Such scenarios can often be better treated as episodic fixed-horizon MDPs, for which only looser bounds on the sample complexity exist. A natural notion of sample complexity in this setting is the number of episodes required to guarantee a certain performance with high probability (PAC guarantee). In this paper, we derive an upper PAC bound $\tilde O(\frac{|\mathcal S|^2 |\mathcal A| H^2}{\epsilon^2} \ln\frac 1 \delta)$ and a lower PAC bound $\tilde \Omega(\frac{|\mathcal S| |\mathcal A| H^2}{\epsilon^2} \ln \frac 1 {\delta + c})$ that match up to log-terms and an additional linear dependency on the number of states $|\mathcal S|$. The lower bound is the first of its kind for this setting. Our upper bound leverages Bernstein's inequality to improve on previous bounds for episodic finite-horizon MDPs which have a time-horizon dependency of at least $H^3$.
from cs.AI updates on arXiv.org http://ift.tt/1GWeRnG
via IFTTT
Ocean City, MD's surf is at least 5.1ft high
Maryland-Delaware, January 24, 2016 at 02:00AM
Ocean City, MD Summary
At 2:00 AM, surf min of 5.1ft. At 8:00 AM, surf min of 4.05ft. At 2:00 PM, surf min of 3.22ft. At 8:00 PM, surf min of 3.15ft.
Surf maximum: 6.08ft (1.85m)
Surf minimum: 5.1ft (1.55m)
Tide height: -0.5ft (-0.15m)
Wind direction: NNW
Wind speed: 24.61 KTS
from Surfline http://ift.tt/1kVmigH
via IFTTT
Ocean City, MD Summary
At 2:00 AM, surf min of 5.1ft. At 8:00 AM, surf min of 4.05ft. At 2:00 PM, surf min of 3.22ft. At 8:00 PM, surf min of 3.15ft.
Surf maximum: 6.08ft (1.85m)
Surf minimum: 5.1ft (1.55m)
Tide height: -0.5ft (-0.15m)
Wind direction: NNW
Wind speed: 24.61 KTS
from Surfline http://ift.tt/1kVmigH
via IFTTT
First Amendment Protects Anonymous Speech, and for Good Reason
Reminding OCR that anonymous speech is protected by the First Amendment and has been a crucial tool for protecting dissident or minority voices ...
from Google Alert - anonymous http://ift.tt/1PoNOit
via IFTTT
from Google Alert - anonymous http://ift.tt/1PoNOit
via IFTTT
Facebook adds Built-in Tor Support for its Android App
Rejoice for Privacy Lovers! Facebook today took a surprising move by announcing that it is bringing the free anonymizing software TOR support to its Android app, almost two years after the social network planned to make Facebook available directly over Tor network. <!-- adsense --> Yes. Believe it or not, the Android version of the popular Facebook application now supports the Tor

from The Hacker News http://ift.tt/1nwpFAr
via IFTTT
from The Hacker News http://ift.tt/1nwpFAr
via IFTTT
Will this module disable caching for anonymous users?
... if this module works with Drupal core caching or Boost module? Just to make sure this module won't disable caching for anonymous users. Thanks.
from Google Alert - anonymous http://ift.tt/1RymOn9
via IFTTT
from Google Alert - anonymous http://ift.tt/1RymOn9
via IFTTT
Zero-Day Flaw Found in 'Linux Kernel' leaves Millions Vulnerable
A new critical zero-day vulnerability has been discovered in the Linux kernel that could allow attackers to gain root level privileges by running a malicious Android or Linux application on an affected device. The critical Linux kernel flaw (CVE-2016-0728) has been identified by a group of researchers at a startup named Perception Point. The vulnerability was present in the code since

from The Hacker News http://ift.tt/1Kposjm
via IFTTT
from The Hacker News http://ift.tt/1Kposjm
via IFTTT
I have a new follower on Twitter
Microsoft Enterprise
Dear followers, @MSFTEnterprise is transitioning to Microsoft in Business, effective 2/01/16. Please follow us on our new handle @MSFT_Business today!
Redmond, WA
http://t.co/kNLYDTdpEP
Following: 10141 - Followers: 30898
January 19, 2016 at 11:57AM via Twitter http://twitter.com/MSFTenterprise
Ravens: Ex-Baltimore RB Ray Rice to coach running backs on Mike Martz's staff at the NFLPA Collegiate Bowl (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
Anonymous complaint about Dutch economist is "unfounded": Report
Vrije Universiteit Amsterdam (VU) has dismissed an anonymous accusation against economist Peter Nijkamp and two of his colleagues, including one ...
from Google Alert - anonymous http://ift.tt/1ZK9ZuD
via IFTTT
from Google Alert - anonymous http://ift.tt/1ZK9ZuD
via IFTTT
Proxima Centauri: The Closest Star

Does the closest star to our Sun have planets? No one is sure -- but you can now follow frequent updates of a new search that is taking place during the first few months of this year. The closest star, Proxima Centauri, is the nearest member of the Alpha Centauri star system. Light takes only 4.24 years to reach us from Proxima Centauri. This small red star, captured in the center of the featured image by the Hubble Space Telescope, is so faint that it was only discovered in 1915 and is only visible through a telescope. Telescope-created X-shaped diffraction spikes surround Proxima Centauri, while several stars further out in our Milky Way Galaxy are visible in the background. The brightest star in the Alpha Centauri system is quite similar to our Sun, has been known as long as recorded history, and is the third brightest star in the night sky. The Alpha Centauri system is primarily visible from Earth's Southern Hemisphere. Starting last week, the European Southern Observatory's Pale Red Dot project began investigating slight changes in Proxima Centauri to see if they result from a planet -- possibly an Earth-sized planet. Although unlikely, were a modern civilization found living on a planet orbiting Proxima Centauri, its proximity makes it a reasonable possibility that humanity could communicate with them. via NASA http://ift.tt/1Os1Ken
Monday, January 18, 2016
Learning the Semantics of Structured Data Sources. (arXiv:1601.04105v1 [cs.AI])
Information sources such as relational databases, spreadsheets, XML, JSON, and Web APIs contain a tremendous amount of structured data that can be leveraged to build and augment knowledge graphs. However, they rarely provide a semantic model to describe their contents. Semantic models of data sources represent the implicit meaning of the data by specifying the concepts and the relationships within the data. Such models are the key ingredients to automatically publish the data into knowledge graphs. Manually modeling the semantics of data sources requires significant effort and expertise, and although desirable, building these models automatically is a challenging problem. Most of the related work focuses on semantic annotation of the data fields (source attributes). However, constructing a semantic model that explicitly describes the relationships between the attributes in addition to their semantic types is critical.
We present a novel approach that exploits the knowledge from a domain ontology and the semantic models of previously modeled sources to automatically learn a rich semantic model for a new source. This model represents the semantics of the new source in terms of the concepts and relationships defined by the domain ontology. Given some sample data from the new source, we leverage the knowledge in the domain ontology and the known semantic models to construct a weighted graph that represents the space of plausible semantic models for the new source. Then, we compute the top k candidate semantic models and suggest to the user a ranked list of the semantic models for the new source. The approach takes into account user corrections to learn more accurate semantic models on future data sources. Our evaluation shows that our method generates expressive semantic models for data sources and services with minimal user input. ...
from cs.AI updates on arXiv.org http://ift.tt/1NhlLjD
via IFTTT
Engineering Safety in Machine Learning. (arXiv:1601.04126v1 [stat.ML])
Machine learning algorithms are increasingly influencing our decisions and interacting with us in all parts of our daily lives. Therefore, just like for power plants, highways, and myriad other engineered sociotechnical systems, we must consider the safety of systems involving machine learning. In this paper, we first discuss the definition of safety in terms of risk, epistemic uncertainty, and the harm incurred by unwanted outcomes. Then we examine dimensions, such as the choice of cost function and the appropriateness of minimizing the empirical average training cost, along which certain real-world applications may not be completely amenable to the foundational principle of modern statistical machine learning: empirical risk minimization. In particular, we note an emerging dichotomy of applications: ones in which safety is important and risk minimization is not the complete story (we name these Type A applications), and ones in which safety is not so critical and risk minimization is sufficient (we name these Type B applications). Finally, we discuss how four different strategies for achieving safety in engineering (inherently safe design, safety reserves, safe fail, and procedural safeguards) can be mapped to the machine learning context through interpretability and causality of predictive models, objectives beyond expected prediction accuracy, human involvement for labeling difficult or rare examples, and user experience design of software.
from cs.AI updates on arXiv.org http://ift.tt/1ZIxC6U
via IFTTT
$\mathbf{D^3}$: Deep Dual-Domain Based Fast Restoration of JPEG-Compressed Images. (arXiv:1601.04149v1 [cs.CV])
In this paper, we design a Deep Dual-Domain ($\mathbf{D^3}$) based fast restoration model to remove artifacts of JPEG compressed images. It leverages the large learning capacity of deep networks, as well as the problem-specific expertise that was hardly incorporated in the past design of deep architectures. For the latter, we take into consideration both the prior knowledge of the JPEG compression scheme, and the successful practice of the sparsity-based dual-domain approach. We further design the One-Step Sparse Inference (1-SI) module, as an efficient and light-weighted feed-forward approximation of sparse coding. Extensive experiments verify the superiority of the proposed $D^3$ model over several state-of-the-art methods. Specifically, our best model is capable of outperforming the latest deep model for around 1 dB in PSNR, and is 30 times faster.
from cs.AI updates on arXiv.org http://ift.tt/1NhlLjz
via IFTTT
Studying Very Low Resolution Recognition Using Deep Networks. (arXiv:1601.04153v1 [cs.CV])
Visual recognition research often assumes a sufficient resolution of the region of interest (ROI). That is usually violated in practical scenarios, inspiring us to explore the general Very Low Resolution Recognition (VLRR) problem. Typically, the ROI in a VLRR problem can be smaller than $16 \times 16$ pixels, and is challenging to be recognized even by human experts. We attempt to solve the VLRR problem using deep learning methods. Taking advantage of techniques primarily in super resolution, domain adaptation and robust regression, we formulate a dedicated deep learning method and demonstrate how these techniques are incorporated step by step. That leads to a series of well-motivated and powerful models. Any extra complexity due to the introduction of a new model is fully justified by both analysis and simulation results. The resulting \textit{Robust Partially Coupled Networks} achieves feature enhancement and recognition simultaneously, while allowing for both the flexibility to combat the LR-HR domain mismatch and the robustness to outliers. Finally, the effectiveness of the proposed models is evaluated on three different VLRR tasks, including face identification, digit recognition and font recognition, all of which obtain very impressive performances.
from cs.AI updates on arXiv.org http://ift.tt/1ZIxC6K
via IFTTT
SimpleDS: A Simple Deep Reinforcement Learning Dialogue System. (arXiv:1601.04574v1 [cs.AI])
This paper presents 'SimpleDS', a simple and publicly available dialogue system trained with deep reinforcement learning. In contrast to previous reinforcement learning dialogue systems, this system avoids manual feature engineering by performing action selection directly from raw text of the last system and (noisy) user responses. Our initial results, in the restaurant domain, show that it is indeed possible to induce reasonable dialogue behaviour with an approach that aims for high levels of automation in dialogue control for intelligent interactive agents.
from cs.AI updates on arXiv.org http://ift.tt/1NhlL3h
via IFTTT
Proactive Message Passing on Memory Factor Networks. (arXiv:1601.04667v1 [cs.AI])
We introduce a new type of graphical model that we call a "memory factor network" (MFN). We show how to use MFNs to model the structure inherent in many types of data sets. We also introduce an associated message-passing style algorithm called "proactive message passing"' (PMP) that performs inference on MFNs. PMP comes with convergence guarantees and is efficient in comparison to competing algorithms such as variants of belief propagation. We specialize MFNs and PMP to a number of distinct types of data (discrete, continuous, labelled) and inference problems (interpolation, hypothesis testing), provide examples, and discuss approaches for efficient implementation.
from cs.AI updates on arXiv.org http://ift.tt/1ZIxww3
via IFTTT
Spectral Ranking using Seriation. (arXiv:1406.5370v3 [cs.LG] UPDATED)
We describe a seriation algorithm for ranking a set of items given pairwise comparisons between these items. Intuitively, the algorithm assigns similar rankings to items that compare similarly with all others. It does so by constructing a similarity matrix from pairwise comparisons, using seriation methods to reorder this matrix and construct a ranking. We first show that this spectral seriation algorithm recovers the true ranking when all pairwise comparisons are observed and consistent with a total order. We then show that ranking reconstruction is still exact when some pairwise comparisons are corrupted or missing, and that seriation based spectral ranking is more robust to noise than classical scoring methods. Finally, we bound the ranking error when only a random subset of the comparions are observed. An additional benefit of the seriation formulation is that it allows us to solve semi-supervised ranking problems. Experiments on both synthetic and real datasets demonstrate that seriation based spectral ranking achieves competitive and in some cases superior performance compared to classical ranking methods.
from cs.AI updates on arXiv.org http://ift.tt/1p7LaGZ
via IFTTT
Reasoning about Entailment with Neural Attention. (arXiv:1509.06664v3 [cs.CL] UPDATED)
While most approaches to automatically recognizing entailment relations have used classifiers employing hand engineered features derived from complex natural language processing pipelines, in practice their performance has been only slightly better than bag-of-word pair classifiers using only lexical similarity. The only attempt so far to build an end-to-end differentiable neural network for entailment failed to outperform such a simple similarity classifier. In this paper, we propose a neural model that reads two sentences to determine entailment using long short-term memory units. We extend this model with a word-by-word neural attention mechanism that encourages reasoning over entailments of pairs of words and phrases. Furthermore, we present a qualitative analysis of attention weights produced by this model, demonstrating such reasoning capabilities. On a large entailment dataset this model outperforms the previous best neural model and a classifier with engineered features by a substantial margin. It is the first generic end-to-end differentiable system that achieves state-of-the-art accuracy on a textual entailment dataset.
from cs.AI updates on arXiv.org http://ift.tt/1NRZGOz
via IFTTT
Unifying Decision Trees Split Criteria Using Tsallis Entropy. (arXiv:1511.08136v4 [stat.ML] UPDATED)
The construction of efficient and effective decision trees remains a key topic in machine learning because of their simplicity and flexibility. A lot of heuristic algorithms have been proposed to construct near-optimal decision trees. ID3, C4.5 and CART are classical decision tree algorithms and the split criteria they used are Shannon entropy, Gain Ratio and Gini index respectively. All the split criteria seem to be independent, actually, they can be unified in a Tsallis entropy framework. Tsallis entropy is a generalization of Shannon entropy and provides a new approach to enhance decision trees' performance with an adjustable parameter $q$. In this paper, a Tsallis Entropy Criterion (TEC) algorithm is proposed to unify Shannon entropy, Gain Ratio and Gini index, which generalizes the split criteria of decision trees. More importantly, we reveal the relations between Tsallis entropy with different $q$ and other split criteria. Experimental results on UCI data sets indicate that the TEC algorithm achieves statistically significant improvement over the classical algorithms.
from cs.AI updates on arXiv.org http://ift.tt/1R7ieuG
via IFTTT
A Novel Regularized Principal Graph Learning Framework on Explicit Graph Representation. (arXiv:1512.02752v2 [cs.AI] UPDATED)
Many scientific datasets are of high dimension, and the analysis usually requires visual manipulation by retaining the most important structures of data. Principal curve is a widely used approach for this purpose. However, many existing methods work only for data with structures that are not self-intersected, which is quite restrictive for real applications. A few methods can overcome the above problem, but they either require complicated human-made rules for a specific task with lack of convergence guarantee and adaption flexibility to different tasks, or cannot obtain explicit structures of data. To address these issues, we develop a new regularized principal graph learning framework that captures the local information of the underlying graph structure based on reversed graph embedding. As showcases, models that can learn a spanning tree or a weighted undirected $\ell_1$ graph are proposed, and a new learning algorithm is developed that learns a set of principal points and a graph structure from data, simultaneously. The new algorithm is simple with guaranteed convergence. We then extend the proposed framework to deal with large-scale data. Experimental results on various synthetic and six real world datasets show that the proposed method compares favorably with baselines and can uncover the underlying structure correctly.
from cs.AI updates on arXiv.org http://ift.tt/1jP1URQ
via IFTTT
ISS Daily Summary Report – 1/18/16
Status: Synchronized Position Hold, Engage, Reorient, Experimental Satellites (SPHERES) Zero Robotics Dry Run: Kelly and Kornienko set up SPHERES hardware and executed a dry run for the Zero Robotics competition scheduled for January 25th. The SPHERES Zero Robotics investigation establishes an opportunity for high school students to design research for the ISS. As part of a competition, students write algorithms for the SPHERES satellites to accomplish tasks relevant to future space missions. The algorithms are tested by the SPHERES team and the best designs are selected for the competition to operate the SPHERES satellites on board the ISS. Circadian Rhythms: Peake configured and donned the Armband Monitor and Thermolab sensors and belt for his Flight Day 30 Circadian Rhythm session. He will wear the monitors for 36 hours, then doff and download the data on Wednesday. Circadian Rhythms investigates the role of synchronized circadian rhythms, or the “biological clock,” and how it changes during long-duration spaceflight. Researchers hypothesize that a non-24-hour cycle of light and dark affects crewmembers’ circadian clocks. The investigation also addresses the effects of reduced physical activity, microgravity and an artificially controlled environment. Changes in body composition and body temperature, which also occur in microgravity, can affect crewmembers’ circadian rhythms as well. Understanding how these phenomena affect the biological clock will improve performance and health for future crewmembers. EvaluatIon and Monitoring of MicrobiofiLms Inside the ISS (ViABLE) Payload Touch: Kelly touched the palm of his hand to experimental materials located on the top covers of ViABLE bags. He also blew on experimental materials located on those covers. This activity is performed approximately every 45 days and the bags are photographed at 6 month intervals. ViABLE involves the evaluation of microbial biofilm development on metallic and textile space materials located inside and on the cover of Nomex pouches. Microbial biofilms are known for causing damage and contamination on the Mir space station and the ISS. The potential application of novel methodologies and products to treat space materials may lead to improvements in the environmental quality of confined human habitats in space and on earth. Post Extravehicular Activity Cleanup: On Saturday, Peake and Kopra completed post EVA activities including EVA Tool Stow, Post-EVA medical assessment, and airlock deconfiguration. They also moved EMUs 3003 and 3005 back to the airlock from the Japanese Experiment Module (JEM) Pressurized Module (JPM). Kelly, Peake and Kopra participated in an EVA debrief with ground specialists. Extravehicular Mobility Unit (EMU) 3011 Status: During last Friday’s EVA, Kopra reported a bubble of water in EMU 3011 helmet. Over the weekend the crew took additional suit samples for return and ground analysis. The suit was pressurized and an unmanned leak screening was performed for a duration of 6 hours. The screening was successfully completed with no leaks detected. Further discussions will be held this week to determine the forward plan for EMU 3011. Starboard Crew Quarters (CQ) Light Housing Assembly (LHA): The CQ LHA failed overnight. The crew replaced it with an on-orbit spare but the spare LHA did not illuminate. A Baseplate Ballast Assembly (BBA) and LHA Remove & Replace (R&R) will be scheduled this week. Today’s Planned Activities All activities were completed unless otherwise noted. Morning Inspection, Laptop RS1(2) Reboot /Onboard Computer System Morning Inspection. SM ПСС (Caution & Warning Panel) Test Daily Planning Conference (S-band) FINEMOTR – Experiment Test Fine Motor Skills – Experiment Ops Final ops with h/w Tropical Cyclone SPHERES – OBT SPHERES Crew Conference DAN. Experiment Ops r/g 0119 DAN. Experiment Operator Assistance / r/g 0119 SPHERES – Camera setup in the Work Area UDOD. Experiment ops using DYKNANIYE-1 and SPRUT-2 sets r/g 1171 Filling (separation) of EDV (KOV) for Elektron or EDV-SV. r/g 0976 SPHERES -Camera adjustment and Zero Robotics dry run test СОЖ Maintenance SPHERES – Hardware power off, battery replacement, and stowage. Review procedure, preliminary EVA timeline, view EVA-42 DVD r/g 1172 SPHERES – Hardware power off, battery replacement, and stowage Auxiliary Laptop Computer System Anti-virus Base Update / r/g 8247 VIABLE – Kit Inspection IMS Delta File Prep Exercise Data Downlink via OCA Fitness Evaluation(On Treadmill) r/g 1173 JRNL – Journal Entry Photo/TV Camcorder Setup Verification / See OPTIMIS Viewer for Procedure Thermolab – Instrumentation Ops for Circadian Rhythms Terminate EMU METOX Regeneration Start EMU Metox Regeneration Daily Planning Conference (S-band) Preparing for Antivirus scan on Auxiliary Computer Laptops r/g 8247 Completed Task List Items Veg-01 plant photo COL CTB photo MSG CF measure Ground Activities All activities were completed unless otherwise noted. Nominal commanding Three-Day Look Ahead: Tuesday, 01/19: NORS O2 Transfer, ELF, Airlock Restow, MBSU Demo Wednesday, 01/20: EMU Loop Scrubs, MBSU Demo, Airway Monitoring, Cardox, Twin Study Thursday, 01/21: ISS Emergency Training, Fundoscope, Airway Monitoring QUICK ISS Status – Environmental Control Group: Component Status Elektron On Vozdukh Manual [СКВ] 1 – SM Air Conditioner System (“SKV1”) On [СКВ] 2 – SM Air Conditioner System (“SKV2”) Off Carbon Dioxide Removal Assembly (CDRA) Lab Standby Carbon Dioxide Removal Assembly (CDRA) Node 3 Operate Major Constituent Analyzer (MCA) Lab Idle Major Constituent Analyzer (MCA) Node 3 Operate Oxygen Generation Assembly (OGA) Process Urine Processing Assembly (UPA) Standby Trace Contaminant Control System (TCCS) Lab Full Up Trace Contaminant Control System (TCCS) Node 3 Off
from ISS On-Orbit Status Report http://ift.tt/1ngz8fB
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/1ngz8fB
via IFTTT
Anonymous VPN Forum, Virtual Services | PIA
Private Internet Access Announcements, News, and Updates.
from Google Alert - anonymous http://ift.tt/23bab5t
via IFTTT
from Google Alert - anonymous http://ift.tt/23bab5t
via IFTTT
I have a new follower on Twitter
Animated Loop
We're a digital gallery that retweets looping GIFs directly from artists' twitter profiles. Artists, we'll be hosting weekly themed challenges starting Jan 1st.
U.S.
Following: 1075 - Followers: 1706
January 18, 2016 at 04:42PM via Twitter http://twitter.com/animatedloop
(requirejs) Uncaught Error: Mismatched anonymous define() module
Uncaught Error: Mismatched anonymous define() module: function (){return o}. not doing anything special I don't think. Here is my requirejs shim:.
from Google Alert - anonymous http://ift.tt/1WnOvOT
via IFTTT
from Google Alert - anonymous http://ift.tt/1WnOvOT
via IFTTT
Orioles: Baltimore restaurant offers Yoenis Cespedes free crab cakes for life if he signs with Orioles (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Multiple cameras with the Raspberry Pi and OpenCV
I’ll keep the introduction to today’s post short, since I think the title of this post and GIF animation above speak for themselves.
Inside this post, I’ll demonstrate how to attach multiple cameras to your Raspberry Pi…and access all of them using a single Python script.
Regardless if your setup includes:
- Multiple USB webcams.
- Or the Raspberry Pi camera module + additional USB cameras…
…the code detailed in this post will allow you to access all of your video streams — and perform motion detection on each of them!
Best of all, our implementation of multiple camera access with the Raspberry Pi and OpenCV is capable of running in real-time (or near real-time, depending on the number of cameras you have attached), making it perfect for creating your own multi-camera home surveillance system.
Keep reading to learn more.
Looking for the source code to this post?
Jump right to the downloads section.
When building a Raspberry Pi setup to leverage multiple cameras, you have two options:
- Simply use multiple USB web cams.
- Or use one Raspberry Pi camera module and at least one USB web camera.
The Raspberry Pi board has only one camera port, so you will not be able to use multiple Raspberry Pi camera boards (unless you want to perform some extensive hacks to your Pi). So in order to attach multiple cameras to your Pi, you’ll need to leverage at least one (if not more) USB cameras.
That said, in order to build my own multi-camera Raspberry Pi setup, I ended up using:
- A Raspberry Pi camera module + camera housing (optional). We can interface with the camera using the
picamera
Python package or (preferably) the threadedVideoStream
class defined in a previous blog post. - A Logitech C920 webcam that is plug-and-play compatible with the Raspberry Pi. We can access this camera using either the
cv2.VideoCapture
function built-in to OpenCV or theVideoStream
class from this lesson.
You can see an example of my setup below:
Figure 1: My multiple camera Raspberry Pi setup.
Here we can see my Raspberry Pi 2, along with the Raspberry Pi camera module (sitting on top of the Pi 2) and my Logitech C920 webcam.
The Raspberry Pi camera module is pointing towards my apartment door to monitor anyone that is entering and leaving, while the USB webcam is pointed towards the kitchen, observing any activity that may be going on:
Figure 2: The Raspberry Pi camera module and USB camera are both hooked up to my Raspberry Pi, but are monitoring different areas of the room.
Ignore the electrical tape and cardboard on the USB camera — this was from a previous experiment which should (hopefully) be published on the PyImageSearch blog soon.
Finally, you can see an example of both video feeds displayed to my Raspberry Pi in the image below:
Figure 3: An example screenshot of monitoring both video feeds from the multiple camera Raspberry Pi setup.
In the remainder of this blog post, we’ll define a simple motion detection class that can detect if a person/object is moving in the field of view of a given camera. We’ll then write a Python driver script that instantiates our two video streams and performs motion detection in both of them.
As we’ll see, by using the threaded video stream capture classes (where one thread per camera is dedicated to perform I/O operations, allowing the main program thread to continue unblocked), we can easily get our motion detectors for multiple cameras to run in real-time on the Raspberry Pi 2.
Let’s go ahead and get started by defining the simple motion detector class.
Defining our simple motion detector
In this section, we’ll build a simple Python class that can be used to detect motion in a field of view of a given camera.
For efficiency, this class will assume there is only one object moving in the camera view at a time — in future blog posts, we’ll look at more advanced motion detection and background subtraction methods to track multiple objects.
In fact, we have already (partially) reviewed this motion detection method in our previous lesson, home surveillance and motion detection with the Raspberry Pi, Python, OpenCV, and Dropbox — we are now formalizing this implementation into a reusable class rather than just inline code.
Let’s get started by opening a new file, naming it
basicmotiondetector.py, and adding in the following code:
# import the necessary packages
import imutils
import cv2
class BasicMotionDetector:
def __init__(self, accumWeight=0.5, deltaThresh=5, minArea=5000):
# determine the OpenCV version, followed by storing the
# the frame accumulation weight, the fixed threshold for
# the delta image, and finally the minimum area required
# for "motion" to be reported
self.isv2 = imutils.is_cv2()
self.accumWeight = accumWeight
self.deltaThresh = deltaThresh
self.minArea = minArea
# initialize the average image for motion detection
self.avg = None
Line 6 defines the constructor to our
BasicMotionDetectorclass. The constructor accepts three optional keyword arguments, which include:
-
accumWeight
: The floating point value used for the taking the weighted average between the current frame and the previous set of frames. A largeraccumWeight
will result in the background model having less “memory” and quickly “forgetting” what previous frames looked like. Using a high value ofaccumWeight
is useful if you except lots of motion in a short amount of time. Conversely, smaller values ofaccumWeight
give more weight to the background model than the current frame, allowing you to detect larger changes in the foreground. We’ll use a default value of0.5
in this example, just keep in mind that this is a tunable parameter that you should consider working with. -
deltaThresh
: After computing the difference between the current frame and the background model, we’ll need to apply thresholding to find regions in a frame that contain motion — thisdeltaThresh
value is used for the thresholding. Smaller values ofdeltaThresh
will detect more motion, while larger values will detect less motion. -
minArea
: After applying thresholding, we’ll be left with a binary image that we extract contours from. In order to handle noise and ignore small regions of motion, we can use theminArea
parameter. Any region with> minArea
is labeled as “motion”; otherwise, it is ignored.
Finally, Line 17 initializes
avg, which is simply the running, weighted average of the previous frames the
BasicMotionDetectorhas seen.
Let’s move on to our
updatemethod:
# import the necessary packages
import imutils
import cv2
class BasicMotionDetector:
def __init__(self, accumWeight=0.5, deltaThresh=5, minArea=5000):
# determine the OpenCV version, followed by storing the
# the frame accumulation weight, the fixed threshold for
# the delta image, and finally the minimum area required
# for "motion" to be reported
self.isv2 = imutils.is_cv2()
self.accumWeight = accumWeight
self.deltaThresh = deltaThresh
self.minArea = minArea
# initialize the average image for motion detection
self.avg = None
def update(self, image):
# initialize the list of locations containing motion
locs = []
# if the average image is None, initialize it
if self.avg is None:
self.avg = image.astype("float")
return locs
# otherwise, accumulate the weighted average between
# the current frame and the previous frames, then compute
# the pixel-wise differences between the current frame
# and running average
cv2.accumulateWeighted(image, self.avg, self.accumWeight)
frameDelta = cv2.absdiff(image, cv2.convertScaleAbs(self.avg)
The
updatefunction requires a single parameter — the image we want to detect motion in.
Line 21 initializes
locs, the list of contours that correspond to motion locations in the image. However, if the
avghas not been initialized (Lines 24-26), we set
avgto the current frame and return from the method.
Otherwise, the
avghas already been initialized so we accumulate the running, weighted average between the previous frames and the current frames, using the
accumWeightvalue supplied to the constructor (Line 32). Taking the absolute value difference between the current frame and the running average yields regions of the image that contain motion — we call this our delta image.
However, in order to actually detect regions in our delta image that contain motion, we first need to apply thresholding and contour detection:
# import the necessary packages
import imutils
import cv2
class BasicMotionDetector:
def __init__(self, accumWeight=0.5, deltaThresh=5, minArea=5000):
# determine the OpenCV version, followed by storing the
# the frame accumulation weight, the fixed threshold for
# the delta image, and finally the minimum area required
# for "motion" to be reported
self.isv2 = imutils.is_cv2()
self.accumWeight = accumWeight
self.deltaThresh = deltaThresh
self.minArea = minArea
# initialize the average image for motion detection
self.avg = None
def update(self, image):
# initialize the list of locations containing motion
locs = []
# if the average image is None, initialize it
if self.avg is None:
self.avg = image.astype("float")
return locs
# otherwise, accumulate the weighted average between
# the current frame and the previous frames, then compute
# the pixel-wise differences between the current frame
# and running average
cv2.accumulateWeighted(image, self.avg, self.accumWeight)
frameDelta = cv2.absdiff(image, cv2.convertScaleAbs(self.avg))
# threshold the delta image and apply a series of dilations
# to help fill in holes
thresh = cv2.threshold(frameDelta, self.deltaThresh, 255,
cv2.THRESH_BINARY)[1]
thresh = cv2.dilate(thresh, None, iterations=2)
# find contours in the thresholded image, taking care to
# use the appropriate version of OpenCV
cnts = cv2.findContours(thresh, cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if self.isv2 else cnts[1]
# loop over the contours
for c in cnts:
# only add the contour to the locations list if it
# exceeds the minimum area
if cv2.contourArea(c) > self.minArea:
locs.append(c)
# return the set of locations
return locs
Calling
cv2.thresholdusing the supplied value of
deltaThreshallows us to binarize the delta image, which we then find contours in (Lines 37-45).
Note: Take special care when examining Lines 43-45. As we know, the
cv2.findContoursmethod return signature changed between OpenCV 2.4 and 3. This codeblock allows us to use
cv2.findContoursin both OpenCV 2.4 and 3 without having to change a line of code (or worry about versioning issues).
Finally, Lines 48-52 loop over the detected contours, check to see if their area is greater than the supplied
minArea, and if so, updates the
locslist.
The list of contours containing motion are then returned to calling method on Line 55.
Note: Again, for a more detailed review of the motion detection algorithm, please see the home surveillance tutorial.
Accessing multiple cameras on the Raspberry Pi
Now that our
BasicMotionDetectorclass has been defined, we are now ready to create the
multi_cam_motion.pydriver script to access the multiple cameras with the Raspberry Pi — and apply motion detection to each of the video streams.
Let’s go ahead and get started defining our driver script:
# import the necessary packages
from __future__ import print_function
from pyimagesearch.basicmotiondetector import BasicMotionDetector
from imutils.video import VideoStream
import numpy as np
import datetime
import imutils
import time
import cv2
# initialize the video streams and allow them to warmup
print("[INFO] starting cameras...")
webcam = VideoStream(src=0).start()
picam = VideoStream(usePiCamera=True).start()
time.sleep(2.0)
# initialize the two motion detectors, along with the total
# number of frames read
camMotion = BasicMotionDetector()
piMotion = BasicMotionDetector()
total = 0
We start off on Lines 2-9 by importing our required Python packages. Notice how we have placed the
BasicMotionDetectorclass inside the
pyimagesearchmodule for organizational purposes. We also import
VideoStream, our threaded video stream class that is capable of accessing both the Raspberry Pi camera module and built-in/USB web cameras.
The
VideoStreamclass is part of the imutils package, so if you do not already have it installed, just execute the following command:
$ pip install imutils
Line 13 initializes our USB webcam
VideoStreamclass while Line 14 initializes our Raspberry Pi camera module
VideoStreamclass (by specifying
usePiCamera=True).
In the case that you do not want to use the Raspberry Pi camera module and instead want to leverage two USB cameras, simply changes Lines 13 and 14 to:
webcam1 = VideoStream(src=0).start() webcam2 = VideoStream(src=1).start()
Where the
srcparameter controls the index of the camera on your machine. Also note that you’ll have to replace
webcamand
picamwith
webcam1and
webcam2, respectively throughout the rest of this script as well.
Finally, Lines 19 and 20 instantiate two
BasicMotionDetector‘s, one for the USB camera and a second for the Raspberry Pi camera module.
We are now ready to perform motion detection in both video feeds:
# import the necessary packages
from __future__ import print_function
from pyimagesearch.basicmotiondetector import BasicMotionDetector
from imutils.video import VideoStream
import numpy as np
import datetime
import imutils
import time
import cv2
# initialize the video streams and allow them to warmup
print("[INFO] starting cameras...")
webcam = VideoStream(src=0).start()
picam = VideoStream(usePiCamera=True).start()
time.sleep(2.0)
# initialize the two motion detectors, along with the total
# number of frames read
camMotion = BasicMotionDetector()
piMotion = BasicMotionDetector()
total = 0
# loop over frames from the video streams
while True:
# initialize the list of frames that have been processed
frames = []
# loop over the frames and their respective motion detectors
for (stream, motion) in zip((webcam, picam), (camMotion, piMotion)):
# read the next frame from the video stream and resize
# it to have a maximum width of 400 pixels
frame = stream.read()
frame = imutils.resize(frame, width=400)
# convert the frame to grayscale, blur it slightly, update
# the motion detector
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (21, 21), 0)
locs = motion.update(gray)
# we should allow the motion detector to "run" for a bit
# and accumulate a set of frames to form a nice average
if total < 32:
frames.append(frame)
continue
On Line 24 we start an infinite loop that is used to constantly poll frames from our (two) camera sensors. We initialize a list of such
frameson Line 26.
Then, Line 29 defines a
forloop that loops over each of the video stream and motion detectors, respectively. We use the
streamto read a
framefrom our camera sensor and then resize the frame to have a fixed width of 400 pixels.
Further pre-processing is performed on Lines 37 and 38 by converting the frame to grayscale and applying a Gaussian smoothing operation to reduce high frequency noise. Finally, the processed frame is passed to our
motiondetector where the actual motion detection is performed (Line 39).
However, it’s important to let our motion detector “run” for a bit so that it can obtain an accurate running average of what our background “looks like”. We’ll allow 32 frames to be used in the average background computation before applying any motion detection (Lines 43-45).
After we have allowed 32 frames to be passed into our
BasicMotionDetector’s, we can check to see if any motion was detected:
# import the necessary packages
from __future__ import print_function
from pyimagesearch.basicmotiondetector import BasicMotionDetector
from imutils.video import VideoStream
import numpy as np
import datetime
import imutils
import time
import cv2
# initialize the video streams and allow them to warmup
print("[INFO] starting cameras...")
webcam = VideoStream(src=0).start()
picam = VideoStream(usePiCamera=True).start()
time.sleep(2.0)
# initialize the two motion detectors, along with the total
# number of frames read
camMotion = BasicMotionDetector()
piMotion = BasicMotionDetector()
total = 0
# loop over frames from the video streams
while True:
# initialize the list of frames that have been processed
frames = []
# loop over the frames and their respective motion detectors
for (stream, motion) in zip((webcam, picam), (camMotion, piMotion)):
# read the next frame from the video stream and resize
# it to have a maximum width of 400 pixels
frame = stream.read()
frame = imutils.resize(frame, width=400)
# convert the frame to grayscale, blur it slightly, update
# the motion detector
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (21, 21), 0)
locs = motion.update(gray)
# we should allow the motion detector to "run" for a bit
# and accumulate a set of frames to form a nice average
if total < 32:
frames.append(frame)
continue
# otherwise, check to see if motion was detected
if len(locs) > 0:
# initialize the minimum and maximum (x, y)-coordinates,
# respectively
(minX, minY) = (np.inf, np.inf)
(maxX, maxY) = (-np.inf, -np.inf)
# loop over the locations of motion and accumulate the
# minimum and maximum locations of the bounding boxes
for l in locs:
(x, y, w, h) = cv2.boundingRect(l)
(minX, maxX) = (min(minX, x), max(maxX, x + w))
(minY, maxY) = (min(minY, y), max(maxY, y + h))
# draw the bounding box
cv2.rectangle(frame, (minX, minY), (maxX, maxY),
(0, 0, 255), 3)
# update the frames list
frames.append(frame)
Line 48 checks to see if motion was detected in the
frameof the current video
stream.
Provided that motion was detected, we initialize the minimum and maximum (x, y)-coordinates associated with the contours (i.e.,
locs). We then loop over the contours individually and use them to determine the smallest bounding box that encompasses all contours (Lines 51-59).
The bounding box is then drawn surrounding the motion region on Lines 62 and 63, followed by our list of
framesupdated on Line 66.
Again, the code detailed in this blog post assumes that there is only one object/person moving at a time in the given frame, hence this approach will obtain the desired result. However, if there are multiple moving objects, then we’ll need to use more advanced background subtraction and tracking methods — future blog posts on PyImageSearch will cover how to perform multi-object tracking.
The last step is to display our
framesto our screen:
# import the necessary packages
from __future__ import print_function
from pyimagesearch.basicmotiondetector import BasicMotionDetector
from imutils.video import VideoStream
import numpy as np
import datetime
import imutils
import time
import cv2
# initialize the video streams and allow them to warmup
print("[INFO] starting cameras...")
webcam = VideoStream(src=0).start()
picam = VideoStream(usePiCamera=True).start()
time.sleep(2.0)
# initialize the two motion detectors, along with the total
# number of frames read
camMotion = BasicMotionDetector()
piMotion = BasicMotionDetector()
total = 0
# loop over frames from the video streams
while True:
# initialize the list of frames that have been processed
frames = []
# loop over the frames and their respective motion detectors
for (stream, motion) in zip((webcam, picam), (camMotion, piMotion)):
# read the next frame from the video stream and resize
# it to have a maximum width of 400 pixels
frame = stream.read()
frame = imutils.resize(frame, width=400)
# convert the frame to grayscale, blur it slightly, update
# the motion detector
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (21, 21), 0)
locs = motion.update(gray)
# we should allow the motion detector to "run" for a bit
# and accumulate a set of frames to form a nice average
if total < 32:
frames.append(frame)
continue
# otherwise, check to see if motion was detected
if len(locs) > 0:
# initialize the minimum and maximum (x, y)-coordinates,
# respectively
(minX, minY) = (np.inf, np.inf)
(maxX, maxY) = (-np.inf, -np.inf)
# loop over the locations of motion and accumulate the
# minimum and maximum locations of the bounding boxes
for l in locs:
(x, y, w, h) = cv2.boundingRect(l)
(minX, maxX) = (min(minX, x), max(maxX, x + w))
(minY, maxY) = (min(minY, y), max(maxY, y + h))
# draw the bounding box
cv2.rectangle(frame, (minX, minY), (maxX, maxY),
(0, 0, 255), 3)
# update the frames list
frames.append(frame)
# increment the total number of frames read and grab the
# current timestamp
total += 1
timestamp = datetime.datetime.now()
ts = timestamp.strftime("%A %d %B %Y %I:%M:%S%p")
# loop over the frames a second time
for (frame, name) in zip(frames, ("Webcam", "Picamera")):
# draw the timestamp on the frame and display it
cv2.putText(frame, ts, (10, frame.shape[0] - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.35, (0, 0, 255), 1)
cv2.imshow(name, frame)
# check to see if a key was pressed
key = cv2.waitKey(1) & 0xFF
# if the `q` key was pressed, break from the loop
if key == ord("q"):
break
# do a bit of cleanup
print("[INFO] cleaning up...")
cv2.destroyAllWindows()
webcam.stop()
picam.stop()
Liens 70-72 increments the
totalnumber of frames processed, followed by grabbing and formatting the current timestamp.
We then loop over each of the
frameswe have processed for motion on Line 75 and display them to our screen.
Finally, Lines 82-86 check to see if the
qkey is pressed, indicating that we should break from the frame reading loop. Lines 89-92 then perform a bit of cleanup.
Motion detection on the Raspberry Pi with multiple cameras
To see our multiple camera motion detector run on the Raspberry Pi, just execute the following command:
$ python multi_cam_motion.py
I have included a series of “highlight frames” in the following GIF that demonstrate our multi-camera motion detector in action:
Figure 4: An example of applying motion detection to multiple cameras using the Raspberry Pi, OpenCV, and Python.
Notice how I start in the kitchen, open a cabinet, reach for a mug, and head to the sink to fill the mug up with water — this series of actions and motion are detected on the first camera.
Finally, I head to the trash can to throw out a paper towel before exiting the frame view of the second camera.
A full video demo of multiple camera access using the Raspberry Pi can be seen below:
Summary
In this blog post, we learned how to access multiple cameras using the Raspberry Pi 2, OpenCV, and Python.
When accessing multiple cameras on the Raspberry Pi, you have two choices when constructing your setup:
- Either use multiple USB webcams.
- Or using a single Raspberry Pi camera module and at least one USB webcam.
Since the Raspberry Pi board has only one camera input, you cannot leverage multiple Pi camera boards — atleast without extensive hacks to your Pi.
In order to provide an interesting implementation of multiple camera access with the Raspberry Pi, we created a simple motion detection class that can be used to detect motion in the frame views of each camera connected to the Pi.
While basic, this motion detector demonstrated that multiple camera access is capable of being executed in real-time on the Raspberry Pi — especially with the help of our threaded
PiVideoStreamand
VideoStreamclasses implemented in blog posts a few weeks ago.
If you are interested in learning more about using the Raspberry Pi for computer vision, along with other tips, tricks, and hacks related to OpenCV, be sure to signup for the PyImageSearch Newsletter using the form at the bottom of this post.
See you next week!
Downloads:
The post Multiple cameras with the Raspberry Pi and OpenCV appeared first on PyImageSearch.
from PyImageSearch http://ift.tt/1OAU739
via IFTTT
Subscribe to:
Posts (Atom)