Name, Anonymous user 782fa6. User since, April 24, 2016. Number of add-ons developed, 0 add-ons. Average rating of developer's add-ons, Not yet ...
from Google Alert - anonymous http://ift.tt/2745a0l
via IFTTT
Saturday, May 7, 2016
Orioles Video: Chris Davis launches a pitch over center field wall with ease, drives in 2 runs in 5-2 win vs. Athletics (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Ravens: TE Mike Flacco, Joe Flacco's younger brother, trying to fulfill dream by making team at age 29 - Jamison Hensley (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
Critical Qualcomm flaw puts millions of Android devices at risk
Google has patched a high-severity vulnerability that has been around for the last five years, potentially leaving users' text messages, call histories, and other sensitive data open to snooping. The vulnerability, CVE-2016-2060, affects Android versions 4.3 and earlier that use the software package maintained by mobile chipmaker Qualcomm, according to a blog post published by security firm


from The Hacker News http://ift.tt/1WgqsER
via IFTTT
from The Hacker News http://ift.tt/1WgqsER
via IFTTT
This 10-year-old Boy becomes the youngest Bug Bounty Hacker
"Talent has no Age Limit" That’s what I said for a 10-year-old Finnish boy on our official Facebook page while sharing his recent achievement with our readers i.e. Winning $10,000 bug bounty from Instagram. Last Tuesday when we at The Hacker News first acknowledged this talented boy and the flaw he discovered in image-sharing social network Instagram, I did not have an idea that the Facebook

from The Hacker News http://ift.tt/1ZpQcMC
via IFTTT
from The Hacker News http://ift.tt/1ZpQcMC
via IFTTT
Founder of 'Liberty Reserve' Sentenced to 20 years in Prison
In Brief Arthur Budovsky, co-founder of popular digital currency business 'Liberty Reserve', was sentenced Friday to 20 years in prison for running a money laundering scheme for hackers, identity thieves, child pornographers and drug dealers around the globe. Since its inception, 2005, to the year 2013, when Liberty Reserve was shut down by authorities, the company processed more than $8

from The Hacker News http://ift.tt/23wJR2S
via IFTTT
from The Hacker News http://ift.tt/23wJR2S
via IFTTT
NGC 7023: The Iris Nebula

These cosmic clouds have blossomed 1,300 light-years away, in the fertile starfields of the constellation Cepheus. Called the Iris Nebula, NGC 7023 is not the only nebula to evoke the imagery of flowers, though. Still, this deep telescopic image shows off the Iris Nebula's range of colors and symmetries, embedded in surrounding fields of interstellar dust. Within the Iris itself, dusty nebular material surrounds a hot, young star. The dominant color of the brighter reflection nebula is blue, characteristic of dust grains reflecting starlight. Central filaments of the reflection nebula glow with a faint reddish photoluminesence as some dust grains effectively convert the star's invisible ultraviolet radiation to visible red light. Infrared observations indicate that this nebula contains complex carbon molecules known as PAHs. The pretty blue petals of the Iris Nebula span about six light-years. The colorful field-of-view stretches almost five Full Moons across the sky. via NASA http://ift.tt/1YcJWY8
Friday, May 6, 2016
I have a new follower on Twitter
Donna Hardman
Following: 3024 - Followers: 68
May 06, 2016 at 07:32PM via Twitter http://twitter.com/olmarkova89838
Anonymous Gun Buyback!
Office of Gang Reduction and Youth Development is sponsoring ANONYMOUS GUN BUYBACK. Turn in your guns to receive a Ralph's gift card: ...
from Google Alert - anonymous http://ift.tt/1q3LMPm
via IFTTT
from Google Alert - anonymous http://ift.tt/1q3LMPm
via IFTTT
New threat for State Attorney from Anonymous Florida
Anonymous Florida has taken to Facebook again to make a public threat against State Attorney David Aronberg. You'll recall the group sent out a ...
from Google Alert - anonymous http://ift.tt/1ZmhB1M
via IFTTT
from Google Alert - anonymous http://ift.tt/1ZmhB1M
via IFTTT
When Anonymous had Scientology in a panic: A new document has us nostalgic for 2008
For today, however, we thought we'd share with you a fun little item they gave us that should make our readers who were involved in the Anonymous ...
from Google Alert - anonymous http://ift.tt/1WNDPLd
via IFTTT
from Google Alert - anonymous http://ift.tt/1WNDPLd
via IFTTT
[FD] Give a warm welcome to Faraday v1.0.19! New GTK interface, Custom Reports & Bug fixing
Faraday v1.0.19 is ready! More documentation, a new interface and plugin fixes are some of the improvements included in this version. Continuing with our efforts to make Faraday accessible to everyone we stopped the development and spent a few days improving our documentation, so feel free to take a look at it and let us know if you feel something is missing! It shouldn't come as a surprise that our QT interface will be deprecated during 2016. As a first step towards its replacement we started building a brand new GTK3 interface! This new, modernized look for Faraday improves how you see and interact with the information. Also, it allows Mac users to finally use the desktop application smoothly and without complications. At the moment, the GTK interface supports all of the most common operations in Faraday: you can create, change and delete workspaces, connect to CouchDB databases, view and change plugin settings. Of course you also have tabs and notifications, just as before (only better). But the best part is that this new GUI uses your zsh shell, this means that you get to keep all your aliases, colors, zsh plugins and prompt. Working with Faraday GTK feels even more like working with your own terminal, plus all the added benefits you already use! We are very excited to release this new interface, but we also know the importance of stability, that's why we decided to release it as experimental, while maintaining QT as our default interface. If you feel like trying the new GTK GUI, just install the dependencies and start up Faraday with the --gui=gtk flag, like this: ./faraday.py --gui=gtk Pro & Corp changes: Changed the way in which Executive Reports are generated adding a DOCX template. Read more about it in: http://ift.tt/24ByzNh - Added GTK3 interface prototype - a brand new interface for you to enjoy! - Improved the documentation - Added plugin detection through report name - if you wish to force Faraday to process your report using a specific plugin, just rename it adding _faraday_PLUGINNAME. For example, if you wish to use the Nmap plugin for the report some_report.xml, rename it to some_report_faraday_Nmap.xml. You can find a detailed list of all available plugins in http://ift.tt/1BRSCsP - Added open services count to Hosts list in WEB UI - as some users suggested, when viewing the list of all Hosts in our WEB UI it was confusing not to know how many services each host had, so we added the amount of services to that list. Improved zsh integration - this means that all plugins are now compatible with our ZSH interface, including fplugin. Read more about Faraday plugins. - Fixed an error in wcscan script - Fixed nikto plugin - Fixed openvas plugin We hope you enjoy it, and let us know if you have any questions or comments. http://ift.tt/1D4inIk http://ift.tt/1D8gKXz https://twitter.com/faradaysec
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] CVE Request for ManageEngine Applications Manager Build No: 12700 Information Disclosure and Un-Authenticated SQL injection.
Heya, Wanted to request CVE for the following issues, that have been fixed by the vendor, fix details are at: http://ift.tt/24Byyc8 [SPSA-2016-02/ManageEngine ApplicationsManager
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] CVE-2016-2784: CMS Made Simple < 2.1.3 & < 1.12.2 Web server Cache Poisoning
============================================= Web Server Cache Poisoning in CMS Made Simple ============================================= CVE-2016-2784 Product Description =================== CMS Made Simple is a great tool with many plugins to publish content on the Web. It aims to be simple to use by end users and to provide a secure and robust website. Website: http://ift.tt/YBoyO4 Description =========== A remote unauthenticated attacker can insert malicious content in a CMS Made Simple installation by poisoning the web server cache when Smarty Cache is activated by modifying the Host HTTP Header in his request. The vulnerability can be triggered only if the Host header is not part of the web server routing process (e.g. if several domains are served by the same web server). This can lead to phishing attacks because of the modification of the site's links, defacement or Cross-Site-Scripting attacks by a lack of filtering of HTML entities in $_SERVER variable. **Access Vector**: remote **Security Risk**: medium **Vulnerability**: CWE-20 **CVSS Base score**: 5.3 (CVSS:3.0/AV:N/AC:L/PR:N/UI:N/S:U/C:N/I:L/A:N)
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] Swagger Editor v2.9.9 "description" Key DOM-based Cross-Site Scripting
RCE Security Advisory http://ift.tt/1FlL0Pz 1. ADVISORY INFORMATION ======================= Product: Swagger Editor Vendor URL: http://ift.tt/1Fs585c Type: Cross-Site Scripting [CWE-79] Date found: 2015-04-07 Date published: 2016-05-03 CVSSv3 Score: 6.3 (AV:N/AC:L/PR:N/UI:R/S:C/C:L/I:L/A:N) CVE: - 2. CREDITS ========== This vulnerability was discovered and researched by Julien Ahrens from RCE Security. 3. VERSIONS AFFECTED ==================== Swagger Editor v2.9.9 (latest) older versions may be affected too. 4. INTRODUCTION =============== Swagger Editor lets you edit Swagger API specifications in YAML inside your browser and to preview documentations in real time. Valid Swagger JSON descriptions can then be generated and used with the full Swagger tooling (code generation, documentation, etc). (from the vendor's homepage) 5. VULNERABILITY DETAILS ======================== The application "Swagger Editor" offers the functionality to import Swagger API specifications via a remote YAML/JSON file, but does not properly validate the "description" key within the imported specification file, which could lead to an unauthenticated DOM-based Cross-Site Scripting vulnerability. The following Proof-of-Concept YAML file triggers this vulnerability: swagger: '2.0' info: version: 1.0.0 title: Echo description: '' paths: /: get: responses: '200': description: Echo GET 6. RISK ======= To successfully exploit this vulnerability, the user must be tricked into importing an arbitrary JSON or YAML file either via the file system or via a remote URL. The vulnerability can be used to temporarily embed arbitrary script code into the context of the Swagger Editor interface, which offers a wide range of possible attacks such as client-side context manipulation or attacking the browser and its components. 7. SOLUTION =========== None. 8. REPORT TIMELINE ================== 2015-04-07: Discovery of the vulnerability 2015-04-07: Notified vendor via contact addresses on GitHub 2015-04-14: Notified vendor via contact addresses on GitHub 2015-04-23: Notified vendor via contact addresses on GitHub 2015-05-02: Notified vendor via contact addresses on GitHub 2015-05-02: Vendor states that creating a public GitHub issue is the proper way according to their policy 2016-05-03: Created http://ift.tt/1WNAQCx 2016-05-03: Advisory released 9. REFERENCES ============= http://ift.tt/1WNAQCx
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] APPLE-SA-2016-05-03-1 Xcode 7.3.1
-----BEGIN PGP SIGNED MESSAGE-
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
ISS Daily Summary Report – 05/05/16
Fluid Shifts Operations In the Service Module: With operator assistance from the ground team, crewmembers continued the third week of the Fluid Shifts experiment run completing a Distortion Product Otoacoustic Emission (DPOAE) test, Optical Coherence Tomography (OCT) exam, Tonometry exam, and a Cerebral and Cochlear Fluid Pressure (CCFP) test. The Fluids Shift investigation is divided into three one-week segments: Dilution Measures, Baseline Imaging, and Baseline Imaging using the Russian Chibis Lower Body Negative Pressure (LBNP) device. The experiment measures how much fluid shifts from the lower body to the upper body, in or out of cells and blood vessels, and determines the impact these shifts have on fluid pressure in the head, changes in vision and eye structures. Microbial Observatory-1 Operations: The first of three Microbial Observatory -1 sample collections this week were completed today when the crew took surface and air sample collections using various devices in multiple locations of the ISS. The investigation monitors the types of microbes present on ISS over a one-year period. Samples are returned to Earth for further study, enabling scientists to understand the diversity of the microbial flora on the ISS and how it changes over time. Strata-1 Data Transfer: The Strata SD cards were replaced and the data was transferred for transmission to the ground. The experiment will run for a year and investigate the properties and behavior of regolith on small, airless bodies. Regolith is the impact-shattered “soil” found on asteroids, comets, the Moon, and other airless worlds, but it is different from soil on Earth in that it contains no living material. Strata-1’s goal is to give us answers about how regolith behaves and moves in microgravity, how easy or difficult it is to anchor a spacecraft in regolith, how it interacts with spacecraft and spacesuit materials, and other important properties. NanoRack Platform-2 Modules Removal: NanoRack Modules 20 and 22 were removed from NanoRack Platform-2. Both NanoRack modules are parents of 4 sub-experiments. The NanoRack Platform is a multipurpose research facility on board the International Space Station (ISS).NanoRack Platforms support NanoRacks Modules in the CubeSat form factor by providing power and data transfer capabilities to operate investigations in microgravity. Dose Tracker: The crew completed entries for medication tracking. This investigation documents the medication usage of crew members before and during their missions by capturing data regarding medication use during spaceflight, including side effect qualities, frequencies and severities. Portable Emergency Provisions (PEPs) Inspection: The crew audited the PEPs hardware to verify that the emergency response equipment is in the expected location and is free of damage. Among the items that were inspected were Water Mist Portable Fire Extinguishers (PFEs), Portable Breathing Apparatus (PBA) including Quick Don mask Assemblies (QDMAs) and Pre-Breathe Masks. Dragon Cargo Transfer Status: The crew has completed 38:40 hours of cargo transfer with ~6 hours of transfer remaining to be completed. Pressurized Mating Adapter (PMA1)/Node 1 Intermodule Ventilation (IMV) Reconfiguration: Following up on the crew’s activity yesterday to reposition the Node 1 Overhead Starboard diffuser vanes so the air flows away from the PMA, today the crew covered the IMV diffuser at NOD1OS4 with Gray Tape and constructed a cone around the diffuser section of PMA1 ducting such that air is redirected back towards the RS. The airflow between the segments is being limited in order to optimize CO2 removal throughout the ISS. Robotics operations: Ground controllers maneuvered the Space Station Remote Manipulator System (SSRMS) in order to gather imagery of defects which had been intentionally created on the SpX-8 Thermal Protection System (TPS). This was to demonstrate the viability of performing and noticing a defect for future crew vehicles. Then the ground team grappled the SpX-8 dragon capsule in preparation for unberth and release scheduled for May 11. Today’s Planned Activities All activities were completed unless otherwise noted. RSS1 laptop BRI data download / r/g 2052 FLUID SHIFTS. Comm configuration for the experiment / r/g 9995 SEISMOPROGNOZ. Downlink data from Control and Data Acquisition Module (МКСД) HDD (start) r/g 1595 FLUID SHIFTS. Gathering and Connecting Equipment for TV coverage HAM radio session from Columbus Remove and Replace EDV-U Waste & Hygiene Compartment (WHC) BRI log download from RSS1 FLUID SHIFTS. OCT Hardware setup in SM IDENTIFICATION. Copy ИМУ-Ц micro-accelerometer data to laptop / r/g 1589 24-hour ECG Monitoring (termination) / r/g 2107 Inspection of Portable Breathing Apparatus (PBA) and Portable Fire Extinguisher (PFE) WRS Recycle Tank Fill NANO Platform-2 Modules Removal СОЖ Maintenance 24-hour BP monitoring (terminate) / r/g 2108 FLUID SHIFTS. Connecting OCT Laptop to RS BRI and HRF PC to ППС-26 (in place of RSE-Med) r/g 2158 FLUID SHIFTS. OCT Power up in SM FLUID SHIFTS. CCFP Activation and Settings Adjustments in RS FLUID SHIFTS. DPOAE Setup in SM RS ISS Module Photos (FGB) / r/g 2114 FLUID SHIFTS. Operator Assistance with Chibis and Gamma-1 r/g 2157 FLUID SHIFTS. Chibis Setup / r/g 2157 FLUID SHIFTS. TONO Hardware setup in SM DRAGON Transfers FLUID SHIFTS. Gathering Data in SM FLUID SHIFTS. Chibis Closeout Ops / r/g 2157 FLUID SHIFTS. Copying Data from CCFP/DPOAE devices and their deactivation in RS FLUID SHIFTS. TONO SM Stowage FLUID SHIFTS. OCT Power off in SM FLUID SHIFTS. Disconnecting of Laptop OCT, HRF and connecting RSE-Med r/g 2159 FLUID SHIFTS. Restore nominal comm config SEISMOPROGNOZ. Download data from Control and Data Acquisition Module (МКСД) HDD (end) and start backup r/g 1595 FLUID SHIFTS. Crew Onboard Support System (КСПЭ) Hardware Deactivation and Closing Applications on ЦП SSC FLUID SHIFTS. OCT SM Stowage MICROBS1. Sample Collection, Part 1 WRS Recycle Tank Fill DRAGON Transfers SSC 5 and 16 Config for ROBoT Ops Inspection and Photography of SM windows No.2, 13, 14 / r/g 2156 RADIOSKAF. Tomsk-TPU 120 Nanosatellite Setup r/g 2160 STRATA SD Card Changeout RADIOSKAF. Photo/Video р/g 2160 VIZIR. Experiment Ops with СКПФУ Hardware r/g 2125 RADIOSKAF. VHF (Kenwood D700) Transceiver Setup to Broadcast r/g 2160 Dragon Cargo Operations Conference WRS Maintenance PAO Hardware Setup Crew Prep for PAO ARED Exercise […]
from ISS On-Orbit Status Report http://ift.tt/1WdQPLE
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/1WdQPLE
via IFTTT
People Rush to Gold in Scramble for Anonymous Currency
People Rush to Gold in Scramble for Anonymous Currency. NewsMax. Published : Friday, May 6, 2016. Related articles and keywords : Gold -.
from Google Alert - anonymous http://ift.tt/24xgt2h
via IFTTT
from Google Alert - anonymous http://ift.tt/24xgt2h
via IFTTT
George Mason faculty expresses concerns that maybe, just maybe, the
George Mason faculty expresses concerns that maybe, just maybe, the "anonymous donor" who gave the school $30 million to name their new law ...
from Google Alert - anonymous http://ift.tt/21CYt1i
via IFTTT
from Google Alert - anonymous http://ift.tt/21CYt1i
via IFTTT
The SONG and the Hunter

Near first quarter, the Moon in March lights this snowy, rugged landscape, a view across the top of Tenerife toward La Palma in the Canary Islands Spanish archipelago. The large Teide volcano, the highest point in Spain, looms over the horizon. Shining above are familiar bright stars of Orion, the Hunter. Adding to the dreamlike scene is the 1 meter diameter prototype telescope of the global network project called the Stellar Observations Network Group or SONG. The SONG's fully robotic observatory was captured during the 30 second exposure while the observatory dome, with slit open, was rotated across the field of view. via NASA http://ift.tt/1Yax1pL
Thursday, May 5, 2016
Orioles Highlight: Kevin Gausman (8 IP, 3 H, 4 K) enjoys best start of season; Pedro Alvarez GW SF in 10th vs. Yankees (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Atlanta colleges look into anonymous Twitter rape claim
(CNN) – Two Atlanta colleges are investigating an anonymous rape claim that has drawn widespread attention since it was shared on social media.
from Google Alert - anonymous http://ift.tt/1TqLVnu
via IFTTT
from Google Alert - anonymous http://ift.tt/1TqLVnu
via IFTTT
I have a new follower on Twitter
3xScreen Media
Video streaming experts, providing live and on-demand online video services for Agencies, Corporates, Events and Sports.
London
http://t.co/Ik2xfmGdMU
Following: 1112 - Followers: 7380
May 05, 2016 at 10:33PM via Twitter http://twitter.com/3xscreen
Anonymous Twitter Describes Alleged Gang Rape at College Party
Raymond Boyd/Getty Images(ATLANTA) — An anonymous Twitter account, which claims to be written by a student at a women's college, has ...
from Google Alert - anonymous http://ift.tt/1SQvzIQ
via IFTTT
from Google Alert - anonymous http://ift.tt/1SQvzIQ
via IFTTT
Movement Coordination in Human-Robot Teams: A Dynamical Systems Approach. (arXiv:1605.01459v1 [cs.RO])
In order to be effective teammates, robots need to be able to understand high-level human behavior to recognize, anticipate, and adapt to human motion. We have designed a new approach to enable robots to perceive human group motion in real-time, anticipate future actions, and synthesize their own motion accordingly. We explore this within the context of joint action, where humans and robots move together synchronously. In this paper, we present an anticipation method which takes high-level group behavior into account. We validate the method within a human-robot interaction scenario, where an autonomous mobile robot observes a team of human dancers, and then successfully and contingently coordinates its movements to "join the dance". We compared the results of our anticipation method to move the robot with another method which did not rely on high-level group behavior, and found our method performed better both in terms of more closely synchronizing the robot's motion to the team, and also exhibiting more contingent and fluent motion. These findings suggest that the robot performs better when it has an understanding of high-level group behavior than when it does not. This work will help enable others in the robotics community to build more fluent and adaptable robots in the future.
from cs.AI updates on arXiv.org http://ift.tt/26YruIE
via IFTTT
ODE - Augmented Training Improves Anomaly Detection in Sensor Data from Machines. (arXiv:1605.01534v1 [cs.AI])
Machines of all kinds from vehicles to industrial equipment are increasingly instrumented with hundreds of sensors. Using such data to detect anomalous behaviour is critical for safety and efficient maintenance. However, anomalies occur rarely and with great variety in such systems, so there is often insufficient anomalous data to build reliable detectors. A standard approach to mitigate this problem is to use one class methods relying only on data from normal behaviour. Unfortunately, even these approaches are more likely to fail in the scenario of a dynamical system with manual control input(s). Normal behaviour in response to novel control input(s) might look very different to the learned detector which may be incorrectly detected as anomalous. In this paper, we address this issue by modelling time-series via Ordinary Differential Equations (ODE) and utilising such an ODE model to simulate the behaviour of dynamical systems under varying control inputs. The available data is then augmented with data generated from the ODE, and the anomaly detector is retrained on this augmented dataset. Experiments demonstrate that ODE-augmented training data allows better coverage of possible control input(s) and results in learning more accurate distinctions between normal and anomalous behaviour in time-series.
from cs.AI updates on arXiv.org http://ift.tt/23tkkHO
via IFTTT
Notes on a model for fuzzy computing. (arXiv:1605.01596v1 [cs.AI])
In these notes we propose a setting for fuzzy computing in a framework similar to that of well-established theories of computation: boolean, and quantum computing. Our efforts have been directed towards stressing the formal similarities: there is a common pattern underlying these three theories. We tried to conform our approach, as much as possible, to this pattern. This work was part of a project jointly with Professor Vittorio Cafagna. Professor Cafagna passed away unexpectedly in 2007. His intellectual breadth and inspiring passion for mathematics is still very well alive.
from cs.AI updates on arXiv.org http://ift.tt/26Yrusq
via IFTTT
Improving abcdSAT by At-Least-One Recently Used Clause Management Strategy. (arXiv:1605.01622v1 [cs.LO])
We improve further the 2015 version of abcdSAT by various heuristics such as at-least-one recently used strategy, learnt clause database approximation reduction etc. Based on the requirement of different tracks at the SAT Competition 2016, we develop three versions of abcdSAT: drup, inc and lim, which participate in the competition of main (agile), incremental library and no-limit track, respectively.
from cs.AI updates on arXiv.org http://ift.tt/23tkmj2
via IFTTT
LSTM-based Mixture-of-Experts for Knowledge-Aware Dialogues. (arXiv:1605.01652v1 [cs.AI])
We introduce an LSTM-based method for dynamically integrating several word-prediction experts to obtain a conditional language model which can be good simultaneously at several subtasks. We illustrate this general approach with an application to dialogue where we integrate a neural chat model, good at conversational aspects, with a neural question-answering model, good at retrieving precise information from a knowledge-base, and show how the integration combines the strengths of the independent components. We hope that this focused contribution will attract attention on the benefits of using such mixtures of experts in NLP.
from cs.AI updates on arXiv.org http://ift.tt/1Tqxobo
via IFTTT
Brain Emotional Learning-Based Prediction Model (For Long-Term Chaotic Prediction Applications). (arXiv:1605.01681v1 [cs.AI])
This study suggests a new prediction model for chaotic time series inspired by the brain emotional learning of mammals. We describe the structure and function of this model, which is referred to as BELPM (Brain Emotional Learning-Based Prediction Model). Structurally, the model mimics the connection between the regions of the limbic system, and functionally it uses weighted k nearest neighbors to imitate the roles of those regions. The learning algorithm of BELPM is defined using steepest descent (SD) and the least square estimator (LSE). Two benchmark chaotic time series, Lorenz and Henon, have been used to evaluate the performance of BELPM. The obtained results have been compared with those of other prediction methods. The results show that BELPM has the capability to achieve a reasonable accuracy for long-term prediction of chaotic time series, using a limited amount of training data and a reasonably low computational time.
from cs.AI updates on arXiv.org http://ift.tt/26YrsAz
via IFTTT
A note on adjusting $R^2$ for using with cross-validation. (arXiv:1605.01703v1 [cs.LG])
We show how to adjust the coefficient of determination ($R^2$) when used for measuring predictive accuracy via leave-one-out cross-validation.
from cs.AI updates on arXiv.org http://ift.tt/1T1yygn
via IFTTT
Learning with Memory Embeddings. (arXiv:1511.07972v8 [cs.AI] UPDATED)
Embedding learning, a.k.a. representation learning, has been shown to be able to model large-scale semantic knowledge graphs. A key concept is a mapping of the knowledge graph to a tensor representation whose entries are predicted by models using latent representations of generalized entities. Latent variable models are well suited to deal with the high dimensionality and sparsity of typical knowledge graphs. In recent publications the embedding models were extended to also consider time evolutions, time patterns and subsymbolic representations. In this paper we map embedding models, which were developed purely as solutions to technical problems for modelling temporal knowledge graphs, to various cognitive memory functions, in particular to semantic and concept memory, episodic memory, sensory memory, short-term memory, and working memory. We discuss learning, query answering, the path from sensory input to semantic decoding, and the relationship between episodic memory and semantic memory. We introduce a number of hypotheses on human memory that can be derived from the developed mathematical models.
from cs.AI updates on arXiv.org http://ift.tt/1NdF4iH
via IFTTT
Multilingual Twitter Sentiment Classification: The Role of Human Annotators. (arXiv:1602.07563v2 [cs.CL] UPDATED)
What are the limits of automated Twitter sentiment classification? We analyze a large set of manually labeled tweets in different languages, use them as training data, and construct automated classification models. It turns out that the quality of classification models depends much more on the quality and size of training data than on the type of the model trained. Experimental results indicate that there is no statistically significant difference between the performance of the top classification models. We quantify the quality of training data by applying various annotator agreement measures, and identify the weakest points of different datasets. We show that the model performance approaches the inter-annotator agreement when the size of the training set is sufficiently large. However, it is crucial to regularly monitor the self- and inter-annotator agreements since this improves the training datasets and consequently the model performance. Finally, we show that there is strong evidence that humans perceive the sentiment classes (negative, neutral, and positive) as ordered.
from cs.AI updates on arXiv.org http://ift.tt/1VFBkrU
via IFTTT
U.S. developing Technology to Identify and Track Hackers Worldwide
Without adequate analysis and algorithms, mass surveillance is not the answer to fighting terrorism and tracking suspects. That's what President Obama had learned last year when he signed the USA Freedom Act, which ends the bulk collection of domestic phone data by US Intelligence Agencies. There is no doubt that US Government is collecting a vast quantity of data from your smartphone to

from The Hacker News http://ift.tt/1T13FJ5
via IFTTT
from The Hacker News http://ift.tt/1T13FJ5
via IFTTT
Anonymous Twitter account sparks gang rape probe at 2 colleges
Investigations have been launched at two elite Atlanta universities following the detailing of an alleged rape by an anonymous Twitter user.
from Google Alert - anonymous http://ift.tt/1T11lSn
via IFTTT
from Google Alert - anonymous http://ift.tt/1T11lSn
via IFTTT
Ravens: Secretary of the Navy Ray Mabus \"confident\" that Keenan Reynolds can play football and honor service commitment (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
MTurk IDs Are Not Anonymous
The worker IDs Amazon's Mechanical Turk gives you may look pretty random and anonymous, but they can reveal personally-identifiable information.
from Google Alert - anonymous http://ift.tt/1Yb02S2
via IFTTT
from Google Alert - anonymous http://ift.tt/1Yb02S2
via IFTTT
Ravens: Even 8-year-old fans asking about Joe Flacco's left knee - Jamison Hensley; his response - \"it's getting better\" (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
SI Releases Annual Anonymous Tour Pro Survey
According to the SI anonymous tour pro survey, the majority of players would rather win another tournament than an Olympic gold medal.
from Google Alert - anonymous http://ift.tt/23rU2G6
via IFTTT
from Google Alert - anonymous http://ift.tt/23rU2G6
via IFTTT
Want to Use Quantum Computer? IBM launches One for Free
In Brief What would you do if you get access to a Quantum Computer? IBM Scientists launches the world’s first cloud-based quantum computing technology, calling the IBM Quantum Experience, for anyone to use. It is an online simulator that lets anyone run algorithms and experiments on the company's five-qubit quantum computer. Quantum computers are expected to take the computing technology to

from The Hacker News http://ift.tt/1WKH1Ho
via IFTTT
from The Hacker News http://ift.tt/1WKH1Ho
via IFTTT
ISS Daily Summary Report – 05/04/16
Fluid Shifts Baseline Imaging Using Chibis in the Russian Segment: The crew began operations for the third and final week of the Fluid Shifts experiment by performing data collections while wearing the Chibis Lower Body Negative Pressure (LBNP) device. The Fluids Shift investigation is divided into three one-week segments: Dilution Measures, Baseline Imaging, and Baseline Imaging using the Russian Chibis Lower Body Negative Pressure (LBNP) device. The experiment measures how much fluid shifts from the lower body to the upper body, in or out of cells and blood vessels, and determines the impact these shifts have on fluid pressure in the head, changes in vision and eye structures. Rodent Research-3 (RR-3) Transfer and Bone Densitometer Scans: Following yesterday’s grip strength operations, today the crew transferred the rodents from their habitats, configured Ultrasound 2, and performed bone densitometer scans with support from ground teams. This is one of three sessions planned this week that studies the molecular and physical changes to the musculoskeletal system that occur in space. Results will expand scientists’ understanding of muscle atrophy and bone loss in space while testing an antibody that has been known to prevent muscle wasting in mice on Earth. Microbial Observatory-1 Review: In preparation for upcoming Microbial Observatory -1 operations, the crew reviewed reference material and videos before discussing sample collection procedures with the payload developer. The Microbial Observatory-1 investigation monitors the types of microbes present on ISS over a one-year period. Samples are returned to Earth for further study, enabling scientists to understand the diversity of the microbial flora on the ISS and how it changes over time. AMS external survey: Last night, Robotics Ground Controllers successfully completed a survey of the Alpha Magnetic Spectrometer (AMS) payload from various angles to understand the state of the payload as well as to obtain detailed views of the payload. This evening, controllers will translate the Mobile Transporter (MT) from Work Site 2 (WS2) to WS4. The Space Station Remote Manipulator System (SSRMS) will then walk off to Node 2 to perform Dragon Thermal Protection System (TPS) inspection and re-grapple in preparation for unberth on May 11. Treadmill 2 (T2) software update: Ground teams updated the software on the T2. The regularly scheduled exercise session on T2 after the update was performed nominally. Pressurized Mating Adapter (PMA1)/Node 1 Intermodule Ventilation (IMV) Reconfiguration: Following the PMA1/Node 1 IMV reconfiguration activity on Monday, data indicated that air exchange is still occurring between the Russian segment and the USOS. Today, to limit the air exchange through the PMA, the crew repositioned the Node 1 Overhead Starboard diffuser vanes so the air flows away from the PMA. Additionally, the crew will be reconfiguring the stowage in the PMA to direct the air coming out of the PMA grille toward the Russian Segment. The airflow between the segments is being limited in order to optimize CO2 removal throughout the ISS. Today’s Planned Activities All activities were completed unless otherwise noted. FLUID SHIFTS. Comm configuration for the experiment / r/g 9995 FLUID SHIFTS. Gathering and Connecting Equipment for TV coverage FLUID SHIFTS. Activation of РБС for Ultrasound Equipment / r/g 2133 FLUID SHIFTS. Ultrasound 2 Setup and Activation in SM Rodent Research (RR) Camcorder Setup FLUID SHIFTS. Assistance with Chibis and Gamma-1 r/g 2136 FLUID SHIFTS. Chibis Setup / r/g 2136 Rodent Research (RR) Animal transfer to MSG and back Rodent Research (RR) Blood Samples Retrieval from MELFI Replacement of ПФ1, ПФ2 Dust Filter cassettes and cleaning В1, B2 fan screens in MRM2 Rodent Research (RR) Experiment Ops Rodent Research (RR) Bone Densitometer Scan FLUID SHIFTS. Ultrasound 2 Scan, Operator 1 FLUID SHIFTS. Ultrasound 2 Scan, Subject Rodent Research (RR) Bone Densitometer Scan СКПФ1, СКПФ2 Dust Filter Replacement and MRM1 Gas-Liquid Heat Exchanger (ГЖТ) Cleaning FLUID SHIFTS. Chibis Closeout Ops / r/g 2136 Rodent Research (RR) Camcorder Setup Gathering and connecting SM-AGAT-U52 charger r/g 2130 Verification of ИП-1 Flow Sensor Position 24-hour ECG Monitoring (start) / r/g 2107 24-hour BP monitoring (start) / r/g 2108 MICRO10 SABL 2 Rack Doors Open Complete the Dose Tracker application Rodent Research (RR) Habitat Transfer FLUID SHIFTS. Chibis Setup / r/g 2135 FLUID SHIFTS. Operator Assistance with Chibis and Gamma-1 r/g 2135 FLUID SHIFTS. Ultrasound 2 Setup and Activation in SM ПФ1, ПФ2 Dust Filter Replacement and В1, В2 Fan Grille Cleaning in DC1 FLUID SHIFTS. Ultrasound 2 Scan, Test Subject FLUID SHIFTS. Ultrasound 2 Scan, Operator Vacuum Cleaning of ВД1 and ВД2 air ducts in DC1 FLUID SHIFTS. Chibis Closeout Ops / r/g 2135 SPHEROIDS. Temperature Check FLUID SHIFTS. Deactivation of РБС and USND / r/g 2134 Soyuz 720 Samsung Tablet Recharge, Initiate Soyuz 719 Samsung Tablet Recharge, Initiate Rodent Research (RR) Habitat Transfer Rodent Research (RR) Experiment Ops FLUID SHIFTS. Ultrasound 2 Stowage in SM Rodent Research (RR) Bone Densitometer Scan FLUID SHIFTS. CCFP hardware, HRF Laptop in SM PMA1 airflow redirect [Deferred] Rodent Research (RR) Bone Densitometer Scan Cleaning of TVS LIV voltage converter vent grille СОЖ Maintenance VIZIR. Experiment Ops with СКПФУ Hardware r/g 2125 FLUID SHIFTS. Installation of cable assembly for voltage converter r/g 2131 FLUID SHIFTS. Hardware Handover to USOS Cleaning FGB ЦВ1 Circulation Fan Screens FSL Optical Adapter Cable removal and restoring EDR and FSL connections Rodent Research (RR) Experiment Ops FLUID SHIFTS. Connecting US-invertor to СУБА FLUID SHIFTS. Crew Onboard Support System (КСПЭ) Hardware Deactivation and Closing Applications FLUID SHIFTS. Restore nominal comm config CONTENT. Experiment Ops / r/g 2119 USND2 Verification of devices and camcorder configuration WHC EDV-U R&R Rodent Research (RR) Habitat Transfer Reconfigure LAB camcorder and Dual Canon Li-Ion Battery Charger to nominal config MICROBS1 Procedure Review CONTENT. Experiment Ops / r/g 2118 MICROBS1 Crew Conference Soyuz 720 Samsung Tablet Recharge, Terminate Flushing БКО for Condensate Water Recovery System r/g 2121 Soyuz 719 Samsung Tablet Recharge, Terminate C2V2 Voice Check Completed Task List Items WHC KTO replace Ground Activities All activities were completed otherwise noted. RR ops support C2V2 checkout Nominal ground commanding Three-Day […]
from ISS On-Orbit Status Report http://ift.tt/1UBmfd3
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/1UBmfd3
via IFTTT
High-Severity OpenSSL Vulnerability allows Hackers to Decrypt HTTPS Traffic
OpenSSL has released a series of patches against six vulnerabilities, including a pair of high-severity flaws that could allow attackers to execute malicious code on a web server as well as decrypt HTTPS traffic. OpenSSL is an open-source cryptographic library that is the most widely being used by a significant portion of the Internet services; to cryptographically protect their sensitive Web

from The Hacker News http://ift.tt/1QSLX68
via IFTTT
from The Hacker News http://ift.tt/1QSLX68
via IFTTT
Hacker is Selling 272 Million Email Passwords for Just $1
A massive database of 272 million emails and passwords for popular email services, including Gmail, Microsoft, and Yahoo, are being offered for sale on the Dark Web for less than $1, media reports. An anonymous Russian hacker, who goes by the moniker "the Collector," was first spotted by cybersecurity firm Hold Security advertising 1.17 Billion user records for email accounts on a dark web

from The Hacker News http://ift.tt/1ZgIp3q
via IFTTT
from The Hacker News http://ift.tt/1ZgIp3q
via IFTTT
Anonymous user 723c52
Name, Anonymous user 723c52. User since, May 3, 2016. Number of add-ons developed, 0 add-ons. Average rating of developer's add-ons, Not yet ...
from Google Alert - anonymous http://ift.tt/1T2QnyR
via IFTTT
from Google Alert - anonymous http://ift.tt/1T2QnyR
via IFTTT
anonymous feedback for registered users and guests
So should the anonymous forum - as long as the proposed anonymity is public, but the real identity can still be traceable. Far too many people would ...
from Google Alert - anonymous http://ift.tt/1W9k15K
via IFTTT
from Google Alert - anonymous http://ift.tt/1W9k15K
via IFTTT
A Mercury Transit Sequence
This coming Monday, Mercury will cross the face of the Sun, as seen from Earth. Called a transit, the last time this happened was in 2006. Because the plane of Mercury's orbit is not exactly coincident with the plane of Earth's orbit, Mercury usually appears to pass over or under the Sun. The above time-lapse sequence, superimposed on a single frame, was taken from a balcony in Belgium shows the entire transit of 2003 May 7. The solar crossing lasted over five hours, so that the above 23 images were taken roughly 15 minutes apart. The north pole of the Sun, the Earth's orbit, and Mercury's orbit, although all different, all occur in directions slightly above the left of the image. Near the center and on the far right, sunspots are visible. After Monday, the next transit of Mercury will occur in 2019. via NASA http://ift.tt/1rUadRe
Wednesday, May 4, 2016
A Comparative Evaluation of Approximate Probabilistic Simulation and Deep Neural Networks as Accounts of Human Physical Scene Understanding. (arXiv:1605.01138v1 [cs.AI])
Humans demonstrate remarkable abilities to predict physical events in complex scenes. Two classes of models for physical scene understanding have recently been proposed: "Intuitive Physics Engines", or IPEs, which posit that people make predictions by running approximate probabilistic simulations in causal mental models similar in nature to video-game physics engines, and memory-based models, which make judgments based on analogies to stored experiences of previously encountered scenes and physical outcomes. Versions of the latter have recently been instantiated in convolutional neural network (CNN) architectures. Here we report four experiments that, to our knowledge, are the first rigorous comparisons of simulation-based and CNN-based models, where both approaches are concretely instantiated in algorithms that can run on raw image inputs and produce as outputs physical judgments such as whether a stack of blocks will fall. Both approaches can achieve super-human accuracy levels and can quantitatively predict human judgments to a similar degree, but only the simulation-based models generalize to novel situations in ways that people do, and are qualitatively consistent with systematic perceptual illusions and judgment asymmetries that people show.
from cs.AI updates on arXiv.org http://ift.tt/21ynqLq
via IFTTT
A Step from Probabilistic Programming to Cognitive Architectures. (arXiv:1605.01180v1 [cs.AI])
Probabilistic programming is considered as a framework, in which basic components of cognitive architectures can be represented in unified and elegant fashion. At the same time, necessity of adopting some component of cognitive architectures for extending capabilities of probabilistic programming languages is pointed out. In particular, implicit specification of generative models via declaration of concepts and links between them is proposed, and usefulness of declarative knowledge for achieving efficient inference is briefly discussed.
from cs.AI updates on arXiv.org http://ift.tt/1rvJslD
via IFTTT
Ontology-Mediated Queries: Combined Complexity and Succinctness of Rewritings via Circuit Complexity. (arXiv:1605.01207v1 [cs.DB])
We give solutions to two fundamental computational problems in ontology-based data access with the W3C standard ontology language OWL 2 QL: the succinctness problem for first-order rewritings of ontology-mediated queries (OMQs), and the complexity problem for OMQ answering. We classify OMQs according to the shape of their conjunctive queries (treewidth, the number of leaves) and the existential depth of their ontologies. For each of these classes, we determine the combined complexity of OMQ answering, and whether all OMQs in the class have polynomial-size first-order, positive existential, and nonrecursive datalog rewritings. We obtain the succinctness results using hypergraph programs, a new computational model for Boolean functions, which makes it possible to connect the size of OMQ rewritings and circuit complexity.
from cs.AI updates on arXiv.org http://ift.tt/1SZzGBf
via IFTTT
Learning from the memory of Atari 2600. (arXiv:1605.01335v1 [cs.LG])
We train a number of neural networks to play games Bowling, Breakout and Seaquest using information stored in the memory of a video game console Atari 2600. We consider four models of neural networks which differ in size and architecture: two networks which use only information contained in the RAM and two mixed networks which use both information in the RAM and information from the screen. As the benchmark we used the convolutional model proposed in NIPS and received comparable results in all considered games. Quite surprisingly, in the case of Seaquest we were able to train RAM-only agents which behave better than the benchmark screen-only agent. Mixing screen and RAM did not lead to an improved performance comparing to screen-only and RAM-only agents.
from cs.AI updates on arXiv.org http://ift.tt/1WJHrOn
via IFTTT
Gated Graph Sequence Neural Networks. (arXiv:1511.05493v3 [cs.LG] UPDATED)
Graph-structured data appears frequently in domains including chemistry, natural language semantics, social networks, and knowledge bases. In this work, we study feature learning techniques for graph-structured inputs. Our starting point is previous work on Graph Neural Networks (Scarselli et al., 2009), which we modify to use gated recurrent units and modern optimization techniques and then extend to output sequences. The result is a flexible and broadly useful class of neural network models that has favorable inductive biases relative to purely sequence-based models (e.g., LSTMs) when the problem is graph-structured. We demonstrate the capabilities on some simple AI (bAbI) and graph algorithm learning tasks. We then show it achieves state-of-the-art performance on a problem from program verification, in which subgraphs need to be matched to abstract data structures.
from cs.AI updates on arXiv.org http://ift.tt/1HXcQTm
via IFTTT
Semantics for probabilistic programming: higher-order functions, continuous distributions, and soft constraints. (arXiv:1601.04943v3 [cs.PL] UPDATED)
We study the semantic foundation of expressive probabilistic programming languages, that support higher-order functions, continuous distributions, and soft constraints (such as Anglican, Church, and Venture). We define a metalanguage (an idealised version of Anglican) for probabilistic computation with the above features, develop both operational and denotational semantics, and prove soundness, adequacy, and termination. They involve measure theory, stochastic labelled transition systems, and functor categories, but admit intuitive computational readings, one of which views sampled random variables as dynamically allocated read-only variables. We apply our semantics to validate nontrivial equations underlying the correctness of certain compiler optimisations and inference algorithms such as sequential Monte Carlo simulation. The language enables defining probability distributions on higher-order functions, and we study their properties.
from cs.AI updates on arXiv.org http://ift.tt/1ltdYJ2
via IFTTT
I have a new follower on Twitter
Healthy Living
Bringing you the latest #health news & alternative treatment solutions. Featured alternative treatment: https://t.co/mNNsYj1mLj
United States
https://t.co/pZlRVSPb7g
Following: 2316 - Followers: 2091
May 04, 2016 at 07:28PM via Twitter http://twitter.com/HealthLivingUSA
Ravens Video: Players show off well-timed photobombing skills on unsuspecting fans at draft party (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
Anonymous attacks Greek Central Bank and vows to take down more banks' sites
Hacktivists affiliated with Anonymous successfully took down the Greek Central Bank's website. They said it was the first in a series of global central ...
from Google Alert - anonymous http://ift.tt/1Y8kLpF
via IFTTT
from Google Alert - anonymous http://ift.tt/1Y8kLpF
via IFTTT
Anonymous Hacker Group Plans To Attack Banks Worldwide
This Tuesday Anonymous, a vigilante, activist group, targeted Greece's central bank. The group hacked into the bank's website and made it almost ...
from Google Alert - anonymous http://ift.tt/1Tm5JZc
via IFTTT
from Google Alert - anonymous http://ift.tt/1Tm5JZc
via IFTTT
Update theme By Anonymous?
Theme "nulis" ask to Update theme By Anonymous? What is this, There is a new version of available. View version 2.0.1 details or update now.
from Google Alert - anonymous http://ift.tt/1rnj3G9
via IFTTT
from Google Alert - anonymous http://ift.tt/1rnj3G9
via IFTTT
ISS Daily Summary Report – 05/03/16
Rodent Research-3 (RR-3) Transfer and Grip Strength Operations: The crew transferred rodents from their habitats to the Microgravity Science Glovebox (MSG) and completed grip strength measurements. Operations were completed ahead of schedule and was the first time on-orbit use of the Grip Meter. This was the first of three RR-3 sessions conducted this week that will study the molecular and physical changes to the musculoskeletal system that happen in space. Results will expand scientists’ understanding of muscle atrophy and bone loss in space while testing an antibody that has been known to prevent muscle wasting in mice on Earth. Fluid Shifts Baseline Imaging in the Russian Segment Preparation: The crew gathered and transferred hardware from the US Segment to the Russian Segment and configured Ultrasound 2 hardware in the Service Module to support Fluid Shifts data collections while the crewmember is wearing Chibis Lower Body Negative Pressure (LBNP) device. Fluids Shift is divided into three one-week segments: Dilution Measures, Baseline Imaging, and Baseline Imaging using the Russian Chibis. The experiment measures how much fluid shifts from the lower body to the upper body, in or out of cells and blood vessels, and determines the impact these shifts have on fluid pressure in the head, changes in vision and eye structures. Plant Gravity Sensing-3 (PGS-3) Closeout: Following yesterday’s successful PGS-3 Sample Fixation operations, today the Chemical Fixation Apparatus samples were inserted into the Minus Eighty Laboratory Freezer for ISS (MELFI) in preparation for return on SpaceX-8. This concludes a two week Japan Aerospace Exploration Agency (JAXA) PGS-3 experiment run which studies whether plants grown in microgravity conditions can sense the changes in the gravitational acceleration and the concentrations of calcium in plant cells changes. Gravity is a critical environmental factor affecting the morphology and functions of organisms on Earth. Radiation Dosimeter inside ISS-Neutron (RaDI-N): After retrieving the RaDI-N hardware from the Russian crewmember, the USOS crew deployed all 8 Space Bubble Detectors in various locations in the ISS for the Radi-N2 experiment. The Canadian Space Agency (CSA) investigation is conducted by measuring neutron radiation levels while onboard the ISS. RaDI-N uses bubble detectors as neutron monitors which have been designed to only detect neutrons and ignore all other radiation. Dose Tracker: The crew configured the Dose Tracker app and completed entries for medication tracking. This investigation documents the medication usage of crew members before and during their missions by capturing data regarding medication use during spaceflight, including side effect qualities, frequencies and severities. Habitability Human Factors Directed Observations: The crew recorded and submitted a walk-through video documenting observations of an area or activity providing insight related to human factors and habitability. The Habitability investigation collects observations about the relationship between crew members and their environment on the ISS. Intra-module Ventilation (IMV) Reconfiguration: Yesterday, in an effort to reduce ppCO2 levels, ground commanding was performed to implement split ventilation between the USOS and Russian segments. The system has not yet reached a steady state, however, ppCO2 is trending lower than the Node 3 CDRA/Vozdukh combination was able to support in the previous configuration. Teams continue to monitor CO2 closely as they characterize the new configuration. Alpha Magnetic Spectrometer (AMS) Survey: Robotics Ground Controllers are currently making preparations to survey the AMS using various cameras from various Space Station Remote Manipulator System (SSRMS)/Special Purpose Dexterous Manipulator (SPDM) positions. The survey is being performed to understand the state of the payload as well as to obtain detailed views of the payload. Following the survey SPDM will be stowed on Mobile Base System 2 (MBS 2) and SSRMS will be maneuvered to a translate configuration. Dragon Cargo Transfer Status: The crew has completed ~34.5 hours of cargo transfer with ~13.5 hours remaining to be completed. Today’s Planned Activities All activities were completed unless otherwise noted. Verification of anti-virus scan results on Auxiliary Computer System [ВКС] laptops / r/g 8247 ESA Weekly Crew Conference Rodent Research (RR) Camcorder Setup Observation and photography using Photo Equipment / r/g 2137 Monitoring hardware activation / r/g 2116 ENERGY Closeout Ops PGS3 SMPL Sample Insertion into MELFI MRM1 Fan Screen Cleaning (Group C) / Ventilation and Air Conditioning System [СВКВ] PGS3 SMPL Sample Transfer from MELFI Complete the Dose Tracker application – Subject PILOT-T. Preparation for Experiment / r/g 2122 RS ISS Module Photos (DC1, MRM1, MRM2) / r/g 2114 Rodent Research (RR) Animal transfer to MSG and back Rodent Research (RR) Measurement Ops Rodent Research (RR) Animal transfer to MSG and back PILOT-T. Experiment Ops / r/g 2122 Rodent Research (RR) Measurement Ops FLUID SHIFTS. USOS H/W Gathering PILOT-T. Experiment Ops / r/g 2123 Rodent Research (RR) Animal transfer to MSG and back Life On The Station Photo and Video / r/g 2000 FLUID SHIFTS. H/W Transfer to RS FLUID SHIFTS. Ultrasound 2 Setup in SM Grab Sample Container (GSC) Sampling Operations FLUID SHIFTS. Connecting Ultrasound Equipment to РБС / r/g 2127 HABIT Video Recording PILOT-T. Closeout Ops / r/g 2123 HABIT Preparing for the experiment PAO Hardware Setup HABIT Procedure Review Water Resource Management (WRM) Initiate Condensate Sampling Disconnecting data cable from BRI / r/g 2126 Crew Prep for PAO DOSETRK Data Export PAO Event Environmental Control & Life Support System (ECLSS) Tank Drain Preventive Maintenance of FS1 Laptop (Cleaning and rebooting) Handover / r/g 1023 MATRYOSHKA-R. Gathering and Initialization of Bubble-Dosimeter Detectors r/g 2117 Preventive Maintenance of FS1 Laptop (Cleaning and rebooting) / r/g 1023 Water Resource Management (WRM) Terminate Condensate Sampling BRI Cleaning (monthly) Handover / r/g 1841 DRAGON Transfers BRI Monthly Maintenance r/g 1841 Rodent Research (RR) Camcorder Setup Environmental Control & Life Support System (ECLSS) Tank Drain Part 2 RADIN Handover of detectors to USOS for deployment MATRYOSHKA-R. Handover of BUBBLE-dosimeters to USOS / r/g 2117 RADIN Dosimeter Deployment MATRYOSHKA-R. BUBBLE-dosimeter detector initialization and deployment for exposure r/g 2117 WRS Recycle Tank Fill from EDV HABIT Camcorder Setup Experiment Ops with СКПФУ Hardware r/g 2125 Copy and Downlink Data / r/g 2116 HABIT Video Recording […]
from ISS On-Orbit Status Report http://ift.tt/1rnfZtC
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/1rnfZtC
via IFTTT
Warning — Widely Popular ImageMagick Tool Vulnerable to Remote Code Execution
A serious zero-day vulnerability has been discovered in ImageMagick, a widely popular software tool used by a large number of websites to process user's photos, which could allow hackers to execute malicious code remotely on servers. ImageMagick is an open-source image processing library that lets users resize, scale, crop, watermarking and tweak images. The ImageMagick tool is supported by

from The Hacker News http://ift.tt/1SNcXpT
via IFTTT
from The Hacker News http://ift.tt/1SNcXpT
via IFTTT
Anonymous attack Greek central bank, warns others
May 4, 2016. ATHENS (Reuters) – Greece's central bank became the target of a cyber attack by activist hacking group Anonymous on Tuesday which ...
from Google Alert - anonymous http://ift.tt/1NV9Y1F
via IFTTT
from Google Alert - anonymous http://ift.tt/1NV9Y1F
via IFTTT
Anonymous Subscriptions
Introduction The Anonymous Subscriptions module allows a non-registered user to your site the ability to register for email notifications to certain ...
from Google Alert - anonymous http://ift.tt/1SLoidm
via IFTTT
from Google Alert - anonymous http://ift.tt/1SLoidm
via IFTTT
Aurora over Sweden

It was bright and green and stretched across the sky. This striking aurora display was captured last month just outside of Östersund, Sweden. Six photographic fields were merged to create the featured panorama spanning almost 180 degrees. Particularly striking aspects of this aurora include its sweeping arc-like shape and its stark definition. Lake Storsjön is seen in the foreground, while several familiar constellations and the star Polaris are visible through the aurora, far in the background. Coincidently, the aurora appears to avoid the Moon visible on the lower left. The aurora appeared a day after a large hole opened in the Sun's corona allowing particularly energetic particles to flow out into the Solar System. The green color of the aurora is caused by oxygen atoms recombining with ambient electrons high in the Earth's atmosphere. via NASA http://ift.tt/23lOPPW
Tuesday, May 3, 2016
Orioles Video: Hot-hitting Mark Trumbo (.337 BA) belts a solo HR and a 2-run shot in 4-1 victory over the Yankees (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Disjunctive Normal Form Schemes for Heterogeneous Attributed Graphs. (arXiv:1605.00686v1 [cs.AI])
Several 'edge-discovery' applications over graph-based data models are known to have worst-case quadratic complexity, even if the discovered edges are sparse. One example is the generic link discovery problem between two graphs, which has invited research interest in several communities. Specific versions of this problem include link prediction in social networks, ontology alignment between metadata-rich RDF data, approximate joins, and entity resolution between instance-rich data. As large datasets continue to proliferate, reducing quadratic complexity to make the task practical is an important research problem. Within the entity resolution community, the problem is commonly referred to as blocking. A particular class of learnable blocking schemes is known as Disjunctive Normal Form (DNF) blocking schemes, and has emerged as state-of-the art for homogeneous (i.e. same-schema) tabular data. Despite the promise of these schemes, a formalism or learning framework has not been developed for them when input data instances are generic, attributed graphs possessing both node and edge heterogeneity. With such a development, the complexity-reducing scope of DNF schemes becomes applicable to a variety of problems, including entity resolution and type alignment between heterogeneous RDF graphs, and link prediction in networks represented as attributed graphs. This paper presents a graph-theoretic formalism for DNF schemes, and investigates their learnability in an optimization framework. Experimentally, the DNF schemes learned on pairs of heterogeneous RDF graphs are demonstrated to achieve high complexity-reductions (98.25% across ten RDF test cases) at little cost to coverage, and with high reliability (<2.5% standard deviation). Finally, one extant class of RDF blocking schemes is shown to be a special case of DNF schemes.
from cs.AI updates on arXiv.org http://ift.tt/24oLh5k
via IFTTT
A heuristic algorithm for a single vehicle static bike sharing rebalancing problem. (arXiv:1605.00702v1 [cs.AI])
The static bike rebalancing problem (SBRP) concerns the task of repositioning bikes among stations in self-service bike-sharing systems. This problem can be seen as a variant of the one-commodity pickup and delivery vehicle routing problem, where multiple visits are allowed to be performed at each station, i.e., the demand of a station is allowed to be split. Moreover, a vehicle may temporarily drop its load at a station, leaving it in excess or, alternatively, collect more bikes from a station (even all of them), thus leaving it in default. Both cases require further visits in order to meet the actual demands of such station. This paper deals with a particular case of the SBRP, in which only a single vehicle is available and the objective is to find a least-cost route that meets the demand of all stations and does not violate the minimum (zero) and maximum (vehicle capacity) load limits along the tour. Therefore, the number of bikes to be collected or delivered at each station should be appropriately determined in order to respect such constraints. We propose an iterated local search (ILS) based heuristic to solve the problem. The ILS algorithm was tested on 980 benchmark instances from the literature and the results obtained are quite competitive when compared to other existing methods. Moreover, our heuristic was capable of finding most of the known optimal solutions and also of improving the results on a number of open instances.
from cs.AI updates on arXiv.org http://ift.tt/26RiFR1
via IFTTT
Obstacle evasion using fuzzy logic in a sliding blades problem environment. (arXiv:1605.00787v1 [cs.AI])
This paper discusses obstacle avoidance using fuzzy logic and shortest path algorithm. This paper also introduces the sliding blades problem and illustrates how a drone can navigate itself through the swinging blade obstacles while tracing a semi-optimal path and also maintaining constant velocity
from cs.AI updates on arXiv.org http://ift.tt/1Za6SHF
via IFTTT
Online Learning of Commission Avoidant Portfolio Ensembles. (arXiv:1605.00788v1 [cs.AI])
We present a novel online ensemble learning strategy for portfolio selection. The new strategy controls and exploits any set of commission-oblivious portfolio selection algorithms. The strategy handles transaction costs using a novel commission avoidance mechanism. We prove a logarithmic regret bound for our strategy with respect to optimal mixtures of the base algorithms. Numerical examples validate the viability of our method and show significant improvement over the state-of-the-art.
from cs.AI updates on arXiv.org http://ift.tt/26RiHse
via IFTTT
Fast Simulation of Probabilistic Boolean Networks (Technical Report). (arXiv:1605.00854v1 [cs.CE])
Probabilistic Boolean networks (PBNs) is an important mathematical framework widely used for modelling and analysing biological systems. PBNs are suited for modelling large biological systems, which more and more often arise in systems biology. However, the large system size poses a~significant challenge to the analysis of PBNs, in particular, to the crucial analysis of their steady-state behaviour. Numerical methods for performing steady-state analyses suffer from the state-space explosion problem, which makes the utilisation of statistical methods the only viable approach. However, such methods require long simulations of PBNs, rendering the simulation speed a crucial efficiency factor. For large PBNs and high estimation precision requirements, a slow simulation speed becomes an obstacle. In this paper, we propose a structure-based method for fast simulation of PBNs. This method first performs a network reduction operation and then divides nodes into groups for parallel simulation. Experimental results show that our method can lead to an approximately 10 times speedup for computing steady-state probabilities of a real-life biological network.
from cs.AI updates on arXiv.org http://ift.tt/1Za6RDM
via IFTTT
Cascading A*: a Parallel Approach to Approximate Heuristic Search. (arXiv:1406.0955v2 [cs.AI] UPDATED)
In this paper, we proposed a new approximate heuristic search algorithm: Cascading A*, which is a two-phrase algorithm combining A* and IDA* by a new concept "envelope ball". The new algorithm CA* is efficient, able to generate approximate solution and any-time solution, and parallel friendly.
from cs.AI updates on arXiv.org http://ift.tt/1mc4Lyt
via IFTTT
Incorporating Knowledge into Structural Equation Models using Auxiliary Variables. (arXiv:1511.02995v3 [stat.ME] UPDATED)
In this paper, we extend graph-based identification methods by allowing background knowledge in the form of non-zero parameter values. Such information could be obtained, for example, from a previously conducted randomized experiment, from substantive understanding of the domain, or even an identification technique. To incorporate such information systematically, we propose the addition of auxiliary variables to the model, which are constructed so that certain paths will be conveniently cancelled. This cancellation allows the auxiliary variables to help conventional methods of identification (e.g., single-door criterion, instrumental variables, half-trek criterion), as well as model testing (e.g., d-separation, over-identification). Moreover, by iteratively alternating steps of identification and adding auxiliary variables, we can improve the power of existing identification methods via a bootstrapping approach that does not require external knowledge. We operationalize this method for simple instrumental sets (a generalization of instrumental variables) and show that the resulting method is able to identify at least as many models as the most general identification method for linear systems known to date. We further discuss the application of auxiliary variables to the tasks of model testing and z-identification.
from cs.AI updates on arXiv.org http://ift.tt/1OD10FS
via IFTTT
I have a new follower on Twitter
K Grimes
Its time to build mass. Using my program you will hit your goal
https://t.co/KWStblqDgI
Following: 281 - Followers: 2
May 03, 2016 at 07:32PM via Twitter http://twitter.com/RoachMadalyn
Bicinium No.23 (Anonymous)
Composer, Anonymous. Key, G Dorian mode. First Publication, 1598 in Il primo libro della musica a due voci (No.23). Piece Style, Renaissance.
from Google Alert - anonymous http://ift.tt/1rSrVV5
via IFTTT
from Google Alert - anonymous http://ift.tt/1rSrVV5
via IFTTT
Bicinium No.24 (Anonymous)
Composer, Anonymous. Key, G Dorian mode. First Publication, 1598 in Il primo libro della musica a due voci (No.24). Piece Style, Renaissance.
from Google Alert - anonymous http://ift.tt/1Z9Marv
via IFTTT
from Google Alert - anonymous http://ift.tt/1Z9Marv
via IFTTT
Orioles: Manny Machado's \"value soars even higher\" with move to SS following injury to J.J. Hardy, Eddie Matz writes (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Craig Wright Will Move Satoshi Nakamoto's Bitcoin to Prove His Claim
Yesterday, BBC broke a story allegedly revealing Craig Wright as the original creator of Bitcoin digital currency Satoshi Nakamoto. However, the highly skeptical cryptographic community is definitely not yet convinced with the technical proofs Wright has yet provided to the media outlets and on his blog. Now, Wright has promised to provide further evidence for his claim that he is behind the

from The Hacker News http://ift.tt/26PT4Ih
via IFTTT
from The Hacker News http://ift.tt/26PT4Ih
via IFTTT
[FD] LSE Leading Security Experts GmbH - LSE-2016-02-03 - OXID eShop Path Traversal Vulnerability
=== LSE Leading Security Experts GmbH - Security Advisory 2016-02-03 === OXID eShop Path Traversal Vulnerability
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] CVE-2016-3627 CVE-2016-3705: libxml2: stack overflow in xml validator (parser)
Hi This is a disclosure of the following issue that was raised a week ago on the distro's mailing list. Both bugs on the gnome bugtracker are currently private and should be made public now. The two attached patches are based off the 2.9.3 libxml2 release. A couple of weeks back while working on a related bug [CVE-2016-3627] I discovered a specially created xml file is capable of triggering a stack overflow before libxml2 can detect its a invalid xml file. We raised this issue upstream on 2016-04-18 and informed them that we would place a two week embargo on the issue in case we didn't here back. As of yet we have had no response so we have posted here. http://ift.tt/24mZ64q We intend to keep the current embargo (ending May 3) unless we get advise otherwise here. Below is a script to generate the xml file along with a tested patch to fix the issue. I will also include our unpublished patch and simplified reproducer for CVE-2016-3627 as again we have had no response upstream and its likely that you will want to fix this less severe issue at the same time. http://ift.tt/1pXMaQ9 python3 repoducer.py ; xmllint repo.xml repoducer.py
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] Mobile Security Framework (MobSF) v0.9.2 Released
Hey Folks, Happy to release MobSF v0.9.2 About MobSF Mobile Security Framework (MobSF) is an intelligent, all-in-one open source mobile application (Android/iOS) automated pen-testing framework capable of performing static and dynamic analysis. It can be used for effective and fast security analysis of Android and iOS Applications and supports both binaries (APK & IPA) and zipped source code. MobSF can also perform Web API Security testing with it's API Fuzzer that can do Information Gathering, analyze Security Headers, identify Mobile API specific vulnerabilities like XXE, SSRF, Path Traversal, IDOR, and other logical issues related to Session and API Rate Limiting. What's New in v0.9.2 * Drag and Drop support, allows upto 8 files in Web GUI * Mass Static Analysis - Mass static analysis on a directory of app binaries or zipped source code * Domain Malware check * Added Google Enjarify * Added procyon decompiler * Allows user to skip inbuilt android classes. (Performance improvement ~ 20%) * Android Code signing certificate check * Detect hardcoded Keystores * Static Analyzer rules updated for Android and iOS * Better Android Manifest analysis rule set * Dynamic Analysis - Runtime Base64 decoding * Support for Home Directory - Move all user created files and settings to Home directory Read more about the new features: http://ift.tt/1Tj7oyL Download v0.9.2: http://ift.tt/24mZ64k GitHub Page: http://ift.tt/1Tj7oyN Documentation: http://ift.tt/1Mhye89 Regards, Ajin Abraham, Security Enthusiast, Bangalore, India +91-9633325997 Linkedin: http://ift.tt/1P92eTn Twitter: https://twitter.com/ajinabraham Web: http://opensecurity.in | https://opsecx.com
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] Moxa MiiNePort - Multiple Vulnerabilities
*Moxa MiiNePort - Multiple Vulnerabilities* Multiple vulnerabilities are present in Moxa MiiNePort. Following versions have been verified, but it is highly probable all other versions are affected as well. *About* Moxa provides a full spectrum of quality products for industrial networking, computing, and automation, and maintains a distribution and service network that reaches customers in more than 70 countries. Our products have connected over 30 million devices worldwide in a wide range of applications, including factory automation, smart rail, smart grid, intelligent transportation, oil & gas, marine, and mining. By continually improving staff expertise in a variety of technologies and markets, we aim to be the first choice for industrial automation solutions. Moxa's embedded serial-to-Ethernet device server modules are small, consume less power, and integration is easy. The embedded serial-to-Ethernet device servers modules consist of the MiiNePort serial device server series and the NE device server module series. Moxa’s MiiNePort E3 series embedded device servers are designed for manufacturers who want to add sophisticated network connectivity to their serial devices with minimal integration effort. The MiiNePort E3 is empowered by the MiiNe, Moxa’s second generation SoC, which supports 10/100 Mbps Ethernet, up to 921.6 kbps serial baudrate, a versatile selection of ready-to-use operation modes, and requires only a small amount of power. By using Moxa’s innovative NetEZ technology, the MiiNePort E3 can be used to convert any device with a standard serial interface to an Ethernet enabled device in no time. In addition, the MiiNePort E3 is a compact embedded device server with an RJ45 connector, making it easy to fit into virtually any existing serial device. http://ift.tt/24mZ4JG http://ift.tt/1Tj7q9R http://ift.tt/24mZ4JI *Confirmed Device Models + Firmware versions* Device name MiiNePort_E1_7080 Firmware version 1.1.10 Build 09120714 Device name MiiNePort_E1_4641 Firmware version 1.1.10 Build 09120714 Device name MiiNePort_E2_1242 Firmware version 1.1 Build 10080614 Device name : MiiNePort_E2_4561 Firmware version : 1.1 Build 10080614 Model name MiiNePort E3 Firmware version 1.0 Build 11071409 *Vulnerability Summary* 1. Weak Credentials Management - CVE-2016-2286 2. Sensitive information not protected - CVE-2016-2295 3. Vulnerable to Cross-Site Request Forgery - CVE-2016-2285 *Vulnerability Description* 1. *Weak Credentials Management* By default, no password is set on the device / application. The device / application does not enforce a mandatory password change mechanism, forcing users to a) set/change the password on first login, b) ensure the password meets complexity requirements, and c) change password periodically. This allows anyone to access the device over HTTP and Telnet. Access to the device provides full administrative functionality. 2. *Sensitive information not protected* Information such as Connect passwords, SNMP community strings is not protected and shown in clear-text when viewing and / or downloaded device config (HTTP / Telnet). 3. Vulnerable to Cross-Site Request Forgery There is no CSRF Token generated per page and / or per (sensitive) function. Successful exploitation of this vulnerability allows silent execution of unauthorized actions on the device such as password change, configuration parameter changes, saving modified configuration, & device reboot. +++++
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] real dangers of gsm setups
what is the real danger of this? http://ift.tt/1WkcnEG is it possible to intercept to the calls?
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] Garage4hackers Ranchoddas Webcast Series CTF Challenge
Hello all, I hope you prepared with Sunday weapons The CTF winning the Hard level will be awarded $150, Medium Level with $125 and Low Level 65$. Ranchoddas CTF Challenge. The bounty will be donated towards the Garage4hackers Maharastra Drought Relief Fund. CTF link: http://92.222.71.224/ Submit your submission to s@garahe4hackers.com Thank you
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] New BlackArch Linux ISOs (2016.04.28) and Installer released
Dear list, We've released the new BlackArch Linux ISOs along with the new installer. They include more than 1400 tools and come with lots of improvements. The armv6h and armv7h repositories are filled with about 1300 tools. A short ChangeLog of the Live-ISOs: - added new (improved) BlackArch Linux installer - include linux kernel 4.5.1 - added new blackarch linux installer - fixed an EFI boot issue - fixed the well-known i686 boot issue - added more than 80 new tools - updated all blackarch tools - updated all system packages - updated menu entries for the window managers (awesome, fluxbox, openbox) If you're not already familiar with BlackArch Linux, please read the DESCRIPTION section below. [ DOWNLOAD ] You can download the new ISOs here: http://ift.tt/1mRMbnj [ DESCRIPTION ] BlackArch Linux is an Arch-based GNU/Linux distribution for pentesters and security researchers. The BlackArch package repository is compatible with existing Arch installs. Here are some of BlackArch's features: - Support for i686, x86_64, armv6h and armv7h architectures - Over 1400 tools (constantly increasing) - Modular package groups - A live ISO with multiple window managers, including dwm, fluxbox, openbox, awesome, wmii, i3 and spectrwm. - An optional installer with the ability to build from source. [ CONTACT ] We mostly work on BlackArch Linux for our personal use. We share it in the hopes that you will contribute by reporting bugs and sharing tools and ideas. We have a relaxed project structure. We welcome pull requests of all sizes through any means, including Github[0] and email[1]. Also see our Twitter account[2] and IRC channel[3]. Although BlackArch is the primary topic in the channel, we also have pleasant conversations about other things. Come join us. It's a happy place. [ THANKS ] We wish to thank all of BlackArch's users, mirrors, and supporters. Thanks for your help. [ DONATIONS ] Our initiative depends on donations in order to be able to pay the server infrastructure and our expences. Therefore we ask for voluntary donations. [ REFERENCES ] [0] http://ift.tt/19stv6i [1] blackarchlinux () gmail com [2] https://twitter.com/blackarchlinux [3] irc://irc.freenode.net/blackarch
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] CVE-2016-3078: php: integer overflow in ZipArchive::getFrom*
Details ======= An integer wrap may occur in PHP 7.x before version 7.0.6 when reading zip files with the getFromIndex() and getFromName() methods of ZipArchive, resulting in a heap overflow. php-7.0.5/ext/zip/php_zip.c ,-
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
Russian Hacker Who Stole From Banks Ordered to Pay $7 Million
A Russian man who spent about 3 years behind bars in the United States has been spared further prison time but ordered to pay $7 Million to cover damages he caused to banks using a vicious computer virus. Nikita Vladimirovich Kuzmin was arrested in 2010 and imprisoned in August 2011 for developing a sophisticated computer malware called Gozi and infecting more than 1 million computers

from The Hacker News http://ift.tt/23lHX53
via IFTTT
from The Hacker News http://ift.tt/23lHX53
via IFTTT
Brazil blocks WhatsApp for 72-Hours — Here's Why
In Brief For the second time in past five months, a Brazil court ordered local telecommunications companies to block the popular messaging app WhatsApp for 72 hours, afterFacebook-owned WhatsApp company refused to hand over information requested in a drug trafficking investigation. The WhatsApp's shutdown is affecting more than 100 million users throughout the country. Moreover, if Brazilian

from The Hacker News http://ift.tt/21sCkD1
via IFTTT
from The Hacker News http://ift.tt/21sCkD1
via IFTTT
I have a new follower on Twitter
CraigBloem
Entrepreneur, Marketing Authority, Business Leader. CEO & Founder https://t.co/enZ8JpzBci (LogoMix Inc.), formerly cofounder at Performable acquired by HubSpot.
Boston, MA
https://t.co/enZ8JpzBci
Following: 1717 - Followers: 1783
May 03, 2016 at 01:32AM via Twitter http://twitter.com/craigbloem
I have a new follower on Twitter
Jan Oldenburg
Focused on digital health and participatory medicine. Chief editor of Engage! Transforming Healthcare Through Digital Patient Engagement.
Boise ID
https://t.co/H0cGCuegk3
Following: 8282 - Followers: 11252
May 03, 2016 at 12:31AM via Twitter http://twitter.com/janoldenburg
Crossing Mars
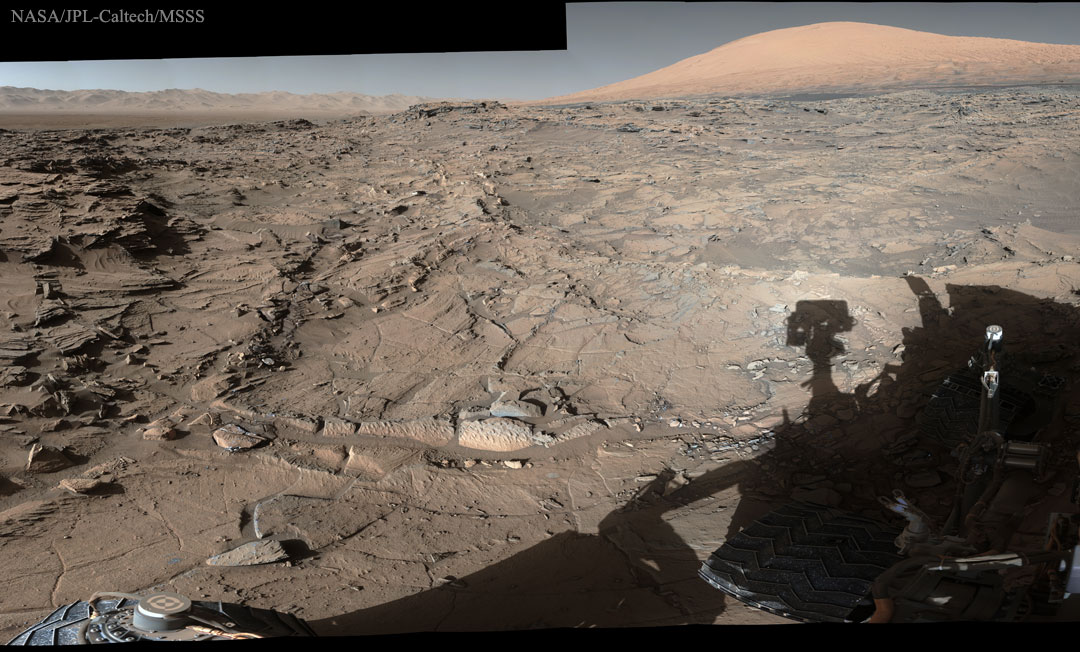
Where is NASA's rover Curiosity going on Mars? Its geographical goals are on the slopes of Mount Sharp, whose peak is seen in the background on the right. A key scientific goal, however, remains to better assess when and where conditions on Mars were once suitable for life, in particular microbial life. To further this goal, Curiosity was directed to cross the rugged terrain of Nautkluft Plateau, visible in the featured image on the foreground left. Curiosity is crossing toward smoother uphill sites with rocks containing hematite and sulfates, sites that could give the rolling rover new clues on how long this part of Mars was wet -- and hence more favorable for life -- before drying out. Of recent concern, however, is Curiosity's aluminum wheels, which are showing increasing signs of wear. Although already fulfilling the goals of its two year study, Curiosity's mission has been extended as it continues to uncover valuable information about the extraordinary past of Mars, the next planet out from the Sun from Earth. via NASA http://ift.tt/1Z2PEfl
Monday, May 2, 2016
Coupon error for anonymous user
Hello, I've an issue with coupon code. Basically, when I try to apply discount code to an order made by an anonymous user, I received the error "not ...
from Google Alert - anonymous http://ift.tt/1SI11Jk
via IFTTT
from Google Alert - anonymous http://ift.tt/1SI11Jk
via IFTTT
Deep Convolutional Neural Networks on Cartoon Functions. (arXiv:1605.00031v1 [cs.IT])
Wiatowski and B\"olcskei, 2015, proved that deformation stability and vertical translation invariance of deep convolutional neural network-based feature extractors are guaranteed by the network structure per se rather than the specific convolution kernels and non-linearities. While the translation invariance result applies to square-integrable functions, the deformation stability bound holds for band-limited functions only. Many signals of practical relevance (such as natural images) exhibit, however, sharp and curved discontinuities and are hence not band-limited. The main contribution of this paper is a deformation stability result that takes these structural properties into account. Specifically, we establish deformation stability bounds for the class of cartoon functions introduced by Donoho, 2001.
from cs.AI updates on arXiv.org http://ift.tt/1rfvCmO
via IFTTT
Higher Order Recurrent Neural Networks. (arXiv:1605.00064v1 [cs.NE])
In this paper, we study novel neural network structures to better model long term dependency in sequential data. We propose to use more memory units to keep track of more preceding states in recurrent neural networks (RNNs), which are all recurrently fed to the hidden layers as feedback through different weighted paths. By extending the popular recurrent structure in RNNs, we provide the models with better short-term memory mechanism to learn long term dependency in sequences. Analogous to digital filters in signal processing, we call these structures as higher order RNNs (HORNNs). Similar to RNNs, HORNNs can also be learned using the back-propagation through time method. HORNNs are generally applicable to a variety of sequence modelling tasks. In this work, we have examined HORNNs for the language modeling task using two popular data sets, namely the Penn Treebank (PTB) and English text8 data sets. Experimental results have shown that the proposed HORNNs yield the state-of-the-art performance on both data sets, significantly outperforming the regular RNNs as well as the popular LSTMs.
from cs.AI updates on arXiv.org http://ift.tt/24kwdG0
via IFTTT
Indoor Massive MIMO: Uplink Pilot Mitigation Using Channel State Information Map. (arXiv:1605.00082v1 [cs.NI])
Massive MIMO brings both motivations and challenges to develop the 5th generation Mobile wireless technology. The promising number of users and the high bitrate offered per unit area are challenged by uplink pilot contamination due to pilot reuse and a limited number of orthogonal pilot sequences. This paper proposes a solution to mitigate uplink pilot contamination in an indoor scenario where multi-cell share the same pool of pilot sequences, that are supposed to be less than the number of users. This can be done by reducing uplink pilots using Channel State Information (CSI) prediction. The proposed method is based on machine learning approach, where a quantized version of Channel State Information (QCSI) is learned during estimation session and stored at the Base Station (BS) to be exploited for future CSI prediction. The learned QCSI are represented by a weighted directed graph, which is responsible to monitor and predict the CSI of User Terminals (UTs) in the local cell. We introduce an online learning algorithm to create and update this graph which we call CSI map. Simulation results show an increase in the downlink sum-rate and a significant feedback reduction.
from cs.AI updates on arXiv.org http://ift.tt/1rfvALM
via IFTTT
Look-ahead before you leap: end-to-end active recognition by forecasting the effect of motion. (arXiv:1605.00164v1 [cs.CV])
Visual recognition systems mounted on autonomous moving agents face the challenge of unconstrained data, but simultaneously have the opportunity to improve their performance by moving to acquire new views of test data. In this work, we first show how a recurrent neural network-based system may be trained to perform end-to-end learning of motion policies suited for the "active recognition" setting. Further, we hypothesize that active vision requires an agent to have the capacity to reason about the effects of its motions on its view of the world. To verify this hypothesis, we attempt to induce this capacity in our active recognition pipeline, by simultaneously learning to forecast the effects of the agent's motions on its internal representation of its cumulative knowledge obtained from all past views. Results across two challenging datasets confirm both that our end-to-end system successfully learns meaningful policies for active recognition, and that "learning to look ahead" further boosts recognition performance.
from cs.AI updates on arXiv.org http://ift.tt/24kwdpk
via IFTTT
Common-Description Learning: A Framework for Learning Algorithms and Generating Subproblems from Few Examples. (arXiv:1605.00241v1 [cs.AI])
Current learning algorithms face many difficulties in learning simple patterns and using them to learn more complex ones. They also require more examples than humans do to learn the same pattern, assuming no prior knowledge. In this paper, a new learning framework is introduced that is called common-description learning (CDL). This framework has been tested on 32 small multi-task datasets, and the results show that it was able to learn complex algorithms from a few number of examples. The final model is perfectly interpretable and its depth depends on the question. What is meant by depth here is that whenever needed, the model learns to break down the problem into simpler subproblems and solves them using previously learned models. Finally, we explain the capabilities of our framework in discovering complex relations in data and how it can help in improving language understanding in machines.
from cs.AI updates on arXiv.org http://ift.tt/1rfvAvp
via IFTTT
A Self-Taught Artificial Agent for Multi-Physics Computational Model Personalization. (arXiv:1605.00303v1 [cs.CE])
Personalization is the process of fitting a model to patient data, a critical step towards application of multi-physics computational models in clinical practice. Designing robust personalization algorithms is often a tedious, time-consuming, model- and data-specific process. We propose to use artificial intelligence concepts to learn this task, inspired by how human experts manually perform it. The problem is reformulated in terms of reinforcement learning. In an off-line phase, Vito, our self-taught artificial agent, learns a representative decision process model through exploration of the computational model: it learns how the model behaves under change of parameters. The agent then automatically learns an optimal strategy for on-line personalization. The algorithm is model-independent; applying it to a new model requires only adjusting few hyper-parameters of the agent and defining the observations to match. The full knowledge of the model itself is not required. Vito was tested in a synthetic scenario, showing that it could learn how to optimize cost functions generically. Then Vito was applied to the inverse problem of cardiac electrophysiology and the personalization of a whole-body circulation model. The obtained results suggested that Vito could achieve equivalent, if not better goodness of fit than standard methods, while being more robust (up to 11% higher success rates) and with faster (up to seven times) convergence rate. Our artificial intelligence approach could thus make personalization algorithms generalizable and self-adaptable to any patient and any model.
from cs.AI updates on arXiv.org http://ift.tt/24kwdpg
via IFTTT
Coalition Formability Semantics with Conflict-Eliminable Sets of Arguments. (arXiv:1605.00495v1 [cs.AI])
We consider abstract-argumentation-theoretic coalition formability in this work. Taking a model from political alliance among political parties, we will contemplate profitability, and then formability, of a coalition. As is commonly understood, a group forms a coalition with another group for a greater good, the goodness measured against some criteria. As is also commonly understood, however, a coalition may deliver benefits to a group X at the sacrifice of something that X was able to do before coalition formation, which X may be no longer able to do under the coalition. Use of the typical conflict-free sets of arguments is not very fitting for accommodating this aspect of coalition, which prompts us to turn to a weaker notion, conflict-eliminability, as a property that a set of arguments should primarily satisfy. We require numerical quantification of attack strengths as well as of argument strengths for its characterisation. We will first analyse semantics of profitability of a given conflict-eliminable set forming a coalition with another conflict-eliminable set, and will then provide four coalition formability semantics, each of which formalises certain utility postulate(s) taking the coalition profitability into account.
from cs.AI updates on arXiv.org http://ift.tt/1rfvC6g
via IFTTT
Graph Clustering Bandits for Recommendation. (arXiv:1605.00596v1 [stat.ML])
We investigate an efficient context-dependent clustering technique for recommender systems based on exploration-exploitation strategies through multi-armed bandits over multiple users. Our algorithm dynamically groups users based on their observed behavioral similarity during a sequence of logged activities. In doing so, the algorithm reacts to the currently served user by shaping clusters around him/her but, at the same time, it explores the generation of clusters over users which are not currently engaged. We motivate the effectiveness of this clustering policy, and provide an extensive empirical analysis on real-world datasets, showing scalability and improved prediction performance over state-of-the-art methods for sequential clustering of users in multi-armed bandit scenarios.
from cs.AI updates on arXiv.org http://ift.tt/24kwd8Y
via IFTTT
Clustering Markov Decision Processes For Continual Transfer. (arXiv:1311.3959v4 [cs.AI] UPDATED)
We present algorithms to effectively represent a set of Markov decision processes (MDPs), whose optimal policies have already been learned, by a smaller source subset for lifelong, policy-reuse-based transfer learning in reinforcement learning. This is necessary when the number of previous tasks is large and the cost of measuring similarity counteracts the benefit of transfer. The source subset forms an `$\epsilon$-net' over the original set of MDPs, in the sense that for each previous MDP $M_p$, there is a source $M^s$ whose optimal policy has $<\epsilon$ regret in $M_p$. Our contributions are as follows. We present EXP-3-Transfer, a principled policy-reuse algorithm that optimally reuses a given source policy set when learning for a new MDP. We present a framework to cluster the previous MDPs to extract a source subset. The framework consists of (i) a distance $d_V$ over MDPs to measure policy-based similarity between MDPs; (ii) a cost function $g(\cdot)$ that uses $d_V$ to measure how good a particular clustering is for generating useful source tasks for EXP-3-Transfer and (iii) a provably convergent algorithm, MHAV, for finding the optimal clustering. We validate our algorithms through experiments in a surveillance domain.
from cs.AI updates on arXiv.org http://ift.tt/1hQHbuA
via IFTTT
A hybrid swarm-based algorithm for single-objective optimization problems involving high-cost analyses. (arXiv:1402.5830v2 [math.OC] UPDATED)
In many technical fields, single-objective optimization procedures in continuous domains involve expensive numerical simulations. In this context, an improvement of the Artificial Bee Colony (ABC) algorithm, called the Artificial super-Bee enhanced Colony (AsBeC), is presented. AsBeC is designed to provide fast convergence speed, high solution accuracy and robust performance over a wide range of problems. It implements enhancements of the ABC structure and hybridizations with interpolation strategies. The latter are inspired by the quadratic trust region approach for local investigation and by an efficient global optimizer for separable problems. Each modification and their combined effects are studied with appropriate metrics on a numerical benchmark, which is also used for comparing AsBeC with some effective ABC variants and other derivative-free algorithms. In addition, the presented algorithm is validated on two recent benchmarks adopted for competitions in international conferences. Results show remarkable competitiveness and robustness for AsBeC.
from cs.AI updates on arXiv.org http://ift.tt/1hMn553
via IFTTT
A Repeated Signal Difference for Recognising Patterns. (arXiv:1604.05170v2 [cs.NE] UPDATED)
This paper describes a new mechanism that might help with defining pattern sequences, by the fact that it can produce an upper bound on the ensemble value that can persistently oscillate with the actual values produced from each pattern. With every firing event, a node also receives an on/off feedback switch. If the node fires, then it sends a feedback result depending on the input signal strength. If the input signal is positive or larger, it can store 'on' switch feedback for the next iteration. If the signal is negative or smaller, it can store an 'off' switch feedback for the next iteration. If the node does not fire, then it does not affect the current feedback situation and receives the switch command produced by the last active pattern event for the same neuron. The upper bound therefore also represents the largest or most enclosing pattern set and the lower value is for the actual set of firing patterns. If the pattern sequence repeats, it will oscillate between the two values, allowing them to be recognised and measured more easily, over time. Tests show that changing the sequence ordering can also be measured.
from cs.AI updates on arXiv.org http://ift.tt/23UuRhj
via IFTTT
Anonymous user 839d2f
Name, Anonymous user 839d2f. User since, February 23, 2016. Number of add-ons developed, 0 add-ons. Average rating of developer's add-ons, Not ...
from Google Alert - anonymous http://ift.tt/23jWT3R
via IFTTT
from Google Alert - anonymous http://ift.tt/23jWT3R
via IFTTT
Ravens not picking up S Matt Elam's 5th-year $5.6M contract option; missed all of 2015 with torn biceps (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
Orioles: SS J.J. Hardy expected to miss 6-8 weeks with hairline fracture in left foot; INF Ryan Flaherty to be recalled (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Wrongly made questionnaire anonymous
Yet, this time I have mistakenly made the questionnaire anonymous and I did not save the referral URL to the questionnaire. At the moment I can thus ...
from Google Alert - anonymous http://ift.tt/24jdYkb
via IFTTT
from Google Alert - anonymous http://ift.tt/24jdYkb
via IFTTT
Ravens Video: Todd McShay says team may have had a historic 4th round in draft; \"I've never seen anything like it\" (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
Charles Finney School gets anonymous $1 million donation
The school says fifty percent of the funds will be invested into an endowment, while the other half will be used for a variety of improvements, the largest ...
from Google Alert - anonymous http://ift.tt/1TG2v5D
via IFTTT
from Google Alert - anonymous http://ift.tt/1TG2v5D
via IFTTT
Ravens: Tears were shed in draft room with the selection of Navy QB Keenan Reynolds, Jamison Hensley writes (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
Accessing RPi.GPIO and GPIO Zero with OpenCV + Python
I can’t believe this is the first time I am writing a blog post on GPIO and the Raspberry Pi. It’s a pretty big mistake on my part. I should have written this post much earlier.
You see, on average, I receive 1-3 emails per week along the lines of:
When I use the ‘cv’ virtual environment, I can access my OpenCV bindings. But then I can’t import RPi.GPIO. When I switch out of the virtual environment (and use the system Python), I can use RPi.GPIO, but I can’t import OpenCV. What gives?
The reason for this problem is that RPi.GPIO/GPIO Zero were not installed into your Python virtual environment! To fix this issue, all you need to do is use
pipto install them into your virtual environment — from there, you’ll be good to go.
But to be honest with you, I don’t think that’s the real issue here!
The real problem is not having a sufficient understanding of what Python virtual environments are and why we use them. Utilizing Python virtual environments is a best practice that you need to become comfortable with.
In the remainder of this blog post, I’ll gently introduce the concept of Python virtual environments. And from there, we’ll learn how to install RPi.GPIO and GPIO Zero into the same Python virtual environment as our OpenCV bindings, allowing us to access both OpenCV and RPi.GPIO/GPIO Zero at the same time!
Keep reading to find out how…
Looking for the source code to this post?
Jump right to the downloads section.
Accessing RPi.GPIO and GPIO Zero with OpenCV + Python
Before we learn how to (correctly) install RPi.GPIO and GPIO Zero on our Raspberry Pi, we first need to review the concept of Python virtual environments.
If you’ve ever followed one of the Raspberry Pi + OpenCV install tutorials on the PyImageSearch blog, you’ll know that I’m a huge fan of Python virtual environments and recommend them for nearly every project.
However, it seems that I haven’t done a good enough job explaining what Python virtual environments are and why we use them. The following section should help clear up any questions.
What are Python virtual environments?
At the very core, Python virtual environments allow us to create isolated, independent environments for each of our Python projects. This implies that each project can have its own set of dependencies, regardless of which dependencies another project has.
So why in the world would we want to create a virtual environment for each of our projects?
Consider this: Suppose we are software contractors and are hired by a company to develop ProjectA. But before we have completed ProjectA, a second company hires us to develop ProjectB. We notice that both ProjectA and ProjectB have a dependency on LibraryA…but the problem is that ProjectA requires v1.0.0 of LibraryA while ProjectB requires v2.0.0!
This is a real issue for Python because we cannot install two different versions of the same library into the same
site-packagesdirectory (i.e., where Python stores 3rd party libraries, such as the ones you download and install from
pip, GitHub, etc.).
So, what do we do?
Do we run out to the nearest Apple Store and buy a new MacBook Pro so we can use one laptop to develop ProjectA and the other to develop ProjectB? I really hope not. That would get expensive quick.
Do use a web host like Linode, Digital Ocean, or Amazon EC2 and spin-up a new instance for each project? This is a better solution, and is highly applicable in some cases, but in our specific instance, it’s overkill.
Or do we use Python virtual environments?
You guessed it — we go with Python virtual environments.
In this case, all we need to do is create a virtual environment for each project, that way there is a separate, isolated, and independent environment for all projects:
Figure 1: Each Python environment we create is separate and independent from the others.
This allows us to install completely different dependencies for ProjectA and ProjectB, ensuring we can finish development of both projects on the same computer.
Pretty neat, right?
Of course, there are many more benefits to using Python virtual environments, but instead of listing them all out, please refer to this excellent Python virtual environments primer on the RealPython blog.
But Adrian, I’m already using Python virtual environments!
If you followed any of the OpenCV install tutorials on the PyImageSearch blog, then you’re already using Python virtual environments.
So how can you find out for sure?
If you need to execute
workon <virtual environment name>before executing your Python script to import OpenCV, then guess what, you’re using Python virtual environments.
But here is the real problem…
You probably installed RPi.GPIO and GPIO Zero incorrectly
“Incorrect” is the wrong word to use here — but I needed to get your attention. When you went to install RPi.GPIO or GPIO Zero, I’m willing to bet you used
apt-get. Your command probably looked (something) like this:
$ sudo apt-get install python-rpi.gpio python-gpiozero
This command will download RPi.GPIO and GPIO Zero from the official Raspbian package repository and install them on your system.
The problem is that
apt-getwill install packages into the system install of Python and not your Python virtual environments.
And this is exactly why you run into problems like:
I can import OpenCV in the ‘cv’ virtual environment, but I can’t import RPi.GPIO. On the other hand, I can import RPi.GPIO outside of the ‘cv’ environment, but then I can’t import cv2.
How do you resolve this issue?
You just need to install your libraries into your virtual environment rather than the system version of Python, which can easily be accomplished by
workonand
pip.
This brings me to my next point:
I do not recommend using
apt-getto install Python libraries.
You’re probably thinking, “But Adrian, using
apt-getis so easy! It’s just one command and then I’m done!”
I’ve got news for you — using
pipis also one command. And it’s just as easy.
To get back to my point, not only will
apt-getinstall these libraries into the system Python (rather than your virtual environment), there is also the issue that
apt-getpackages are normally a bit out of date.
And guess what happens when you want to install the newest version of a given library?
Hint: You run into the exact problem detailed above — you’ll be trying to install two different versions of the same library into the same
site-packagesdirectory, which simply cannot happen (due to how Python works).
Instead, you should be using the Python package manager, pip, to install your Python packages into virtual environments. For more information on
pip, how it works, and why we use it, please refer to this article.
Installing RPi.GPIO and GPIO Zero “correctly”
Let’s go ahead and get RPi.GPIO and GPIO zero installed into our Python virtual environment. To start, first use the
workoncommand to enter your Python virtual environment:
$ workon <virtual environment name>
Note: You may need to execute
source ~/.profileprior to running the
workoncommand so that the virtual environment startup scripts are loaded.
You can tell you are in a Python virtual environment if the name of the environment appears in parenthesis before your prompt:
Figure 2: I can tell I am in the “cv” virtual environment because I can see the text “(cv)” before my prompt.
In this case, I have entered the
cvvirtual environment and I can verify this because I see the text “(cv)” before my prompt.
From there, we can let
pipinstall RPi.GPIO and GPIO Zero for us:
$ pip install RPi.GPIO $ pip install gpiozero
Lastly, let’s test the install and ensure we can import RPi.GPIO, GPIO Zero, and OpenCV together:
$ python >>> import RPi.GPIO >>> import gpiozero >>> import cv2 >>>
Note: I’ve made the assumption that the virtual environment you are using already has OpenCV installed in it. My
cvvirtual environment has OpenCV already installed, so by using
pipto install the
RPi.GPIOand
gpiozeroto install the respective GPIO packages, I’m able to access all three libraries from within the same environment.
Once you can import these libraries in the same environment, we’re ready to move on.
Hardware
For this blog post, I used my Raspberry Pi 3 and the TrafficHAT board, a really cool module for the Raspberry Pi that allows you to get started quickly and easily with GPIO programming:
Figure 3: The TrafficHAT module for the Raspberry Pi, which includes 3 LED lights, a buzzer, and push button, all of which are programmable via GPIO.
As you can see, the TrafficHAT includes 3 big LED lights, a push-button, and a buzzer.
Note: It’s called a “hat” because we simply need to set it on top of the GPIO pins — no breakout board, extra cables, or soldering is required.
Once we have the TrafficHAT installed on the Raspberry Pi, we can program it using nearly any programming language (provided the language can access the GPIO pins), but for the purposes of this blog post, we’ll be using Python + RPi.GPIO and GPIO Zero.
Using RPi.GPIO + OpenCV
Let’s go ahead and write some code to access the TrafficHAT board using the RPi.GPIO library. We’ll also utilize OpenCV to load an image from file and display it to our screen.
Open up a new file, name it
gpio_demo.py, and insert the following code:
# import the necessary packages
import RPi.GPIO as GPIO
import time
import cv2
# load the input image and display it to our screen
print("click on the image and press any key to continue...")
image = cv2.imread("hoover_dam.jpg")
cv2.imshow("Image", image)
cv2.waitKey(0)
print("moving on...")
# set the GPIO mode
GPIO.setmode(GPIO.BCM)
# loop over the LEDs on the TrafficHat and light each one
# individually
for i in (22, 23, 24):
GPIO.setup(i, GPIO.OUT)
GPIO.output(i, GPIO.HIGH)
time.sleep(3.0)
GPIO.output(i, GPIO.LOW)
# perform a bit of cleanup
GPIO.cleanup()
Lines 2-4 handle importing our required Python packages. We then load the input image from disk and display it to our screen on Lines 8-10. Our script will pause execution until we click on the active image window and press any key on our keyboard.
From there, we loop over each of the LEDs on the TrafficHAT (Line 18). For each of these lights, we:
- Turn the LED light on.
- Wait 3 seconds.
- Turn the light off and continue looping.
To execute
gpio_demo.py, make sure you are in the
cvvirtual environment (or whatever virtual environment you are using to store your OpenCV bindings + GPIO libraries) by using the
workoncommand:
$ workon cv
We can then run the
gpio_demo.pyscript:
$ python gpio_demo.py
As the output image demonstrates, we can see that our
hoover_dam.jpgimage is displayed to the screen and the green LED lights is shining brightly on the TrafficHAT:
Figure 4: Loading an image to my screen using OpenCV and then lighting up the green LED using GPIO.
What about root?
But what if we wanted to execute
gpio_demo.pyas the root user? What do we do then?
We have two options here.
The first option is to use the
sudocommand inside our Python virtual environment, like this:
$ sudo python gpio_demo.py
Note: Make sure you are in your Python virtual environment before executing your script with
sudo; otherwise, you will not have access to the libraries installed in your virtual environment.
The second option is to launch a root shell, access our Python virtual environment, and then execute the script:
$ sudo /bin/bash $ source /home/pi/.profile $ workon cv $ python gpio_demo.py
Which one is best?
To be honest, it doesn’t really matter.
There are some cases where using
sudois easier. And there are others where it’s nice to simply have a root shell pulled up. Use whichever option you’re more comfortable with — just be careful when executing commands as root!
Using RPI Zero + OpenCV
Now that we’ve explored RPi.GPIO, let’s re-create the same Python script, but this time using the GPIO Zero library. Open up a different file, name it
gpiozero_demo.py, and insert the following code:
# import the necessary packages
from gpiozero import TrafficHat
import time
import cv2
# load the input image and display it to our screen
print("click on the image and press any key to continue...")
image = cv2.imread("hoover_dam.jpg")
cv2.imshow("Image", image)
cv2.waitKey(0)
print("moving on...")
# initialize the TrafficHAT, then create the list of lights
th = TrafficHat()
lights = (th.lights.green, th.lights.amber, th.lights.red)
# loop over the lights and turn them on one-by-one
for light in lights:
light.on()
time.sleep(3.0)
light.off()
Lines 2-4 again handle importing our required packages. What’s really interesting here is that the
gpiozerolibrary has a
TrafficHatclass, which enables us to easily interface with the TrafficHAT module.
Lines 8-10 handle loading and displaying our input image to sour screen.
We can then initialize the
TrafficHatobject and construct the list of
lightson Lines 14 and 15.
Finally, Lines 18-21 handle looping over each of the
lights, turning each on individually, waiting 3 seconds, and then turning the
lightoff before moving to the next one.
Just like the RPi.GPIO example, we first need to access our Python virtual environment and then execute our script:
$ workon cv $ python gpiozero_demo.py
As the script executes, we can see an image displayed to our screen and the LEDs lighting up:
Figure 5: A second example of using OpenCV to display an image and then utilizing GPIO to illuminate an LED.
Note: To execute this script as root, follow the instructions detailed in the previous section.
Summary
In this blog post, I started by reviewing what Python virtual environments are and why we use them. Simply put, Python virtual environments allow us to create independent, isolated development environments for each project we work on, ensuring we don’t run into version dependency issues. Furthermore, virtual environments allow us to keep our system install of Python clean and tidy.
Once we understood the basics of Python virtual environments, I detailed how to (correctly) install RPi.GPIO and GPIO Zero such that we can access both GPIO libraries and OpenCV at the same time.
We then developed a simple Python script that loads an image from disk using OpenCV, displays it to our screen, and then lights up various LEDs on the TrafficHAT.
In the next blog post, we’ll create a more advanced GPIO + OpenCV script, this time lighting up LEDs and buzzing the buzzer whenever a pre-defined visual action takes place.
Be sure to enter your email address in the form below to be notified when the next blog post goes live, you won’t want to miss it!
Downloads:
The post Accessing RPi.GPIO and GPIO Zero with OpenCV + Python appeared first on PyImageSearch.
from PyImageSearch http://ift.tt/1QNnA9P
via IFTTT
Subscribe to:
Posts (Atom)