Prince Harry's fiancée Meghan Markle identity revealed as secret Hollywood blog author in surprise report.
from Google Alert - anonymous http://ift.tt/2sROFdc
via IFTTT
Saturday, February 24, 2018
atom/atom
[ insert speech about ethics and open-source values/ how such data would help a wider range of devs/gain trust in the public about Anonymous Usage Stats]. Personally, I'm just curious on how the data looks like for fun. All programs usually have Stats but what do those stats look like to the devs.
from Google Alert - anonymous http://ift.tt/2EVqbkw
via IFTTT
from Google Alert - anonymous http://ift.tt/2EVqbkw
via IFTTT
Anonymous Conspiracy Theorist
Vector t-shirt design. Conspiracy Theme. Inspired by Anonymous. Zip contains: .AI Colors editable. Mockups are not included. Press-Ready.
from Google Alert - anonymous http://ift.tt/2CHFA68
via IFTTT
from Google Alert - anonymous http://ift.tt/2CHFA68
via IFTTT
Anonymous Contact Form
Anonymous Contact Form. Breadcrumb. Home · Contact; Contact. logo. About Us. The Christ's College Students Union (CCSU) is the body charged with representing both the undergraduate and graduate students of Christ's College, unless they have chosen to opt out. Rather confusingly the CCSU is ...
from Google Alert - anonymous http://ift.tt/2ooAjfy
via IFTTT
from Google Alert - anonymous http://ift.tt/2ooAjfy
via IFTTT
Format Manuscript/Mixed Material
Results: 1-9 of 9 | Refined by: Original Format: Manuscript/Mixed Material Remove Look Inside: Anonymous to Thomas Jefferson, November 19, 1808, Signed Old Traveler (mtj1.042_0986_0994/) Remove ...
from Google Alert - anonymous http://ift.tt/2ow9Qfh
via IFTTT
from Google Alert - anonymous http://ift.tt/2ow9Qfh
via IFTTT
Orioles: 2B Jonathan Schoop (elbow) expected to miss some time, says Buck Showalter (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Friday, February 23, 2018
Do What's Right
The Davenport Police Department has made it simple for everyone to anonymously report information and ask for help through the “Do What's Right” Program. If you see or hear something suspicious or concerning, we encourage you to submit an anonymous tip, anytime/anywhere. Let's work together in ...
from Google Alert - anonymous http://ift.tt/2EMKZuz
via IFTTT
from Google Alert - anonymous http://ift.tt/2EMKZuz
via IFTTT
how to use anonymous functions
how to use anonymous functions. Learn more about anonymous function, functions.
from Google Alert - anonymous http://ift.tt/2CGpTfs
via IFTTT
from Google Alert - anonymous http://ift.tt/2CGpTfs
via IFTTT
Unity Day
Twelve Steps and Twelve Traditions of Overeaters Anonymous, First Edition, p. 107; A Common Solution: Diversity and Recovery p. 8 and p.2; Twelve Steps and Twelve Traditions of Overeaters Anonymous, First Edition, p. 110; OA Inc. Bylaws, Subpart B, Article V; Twelve Steps and Twelve Traditions of ...
from Google Alert - anonymous http://ift.tt/2F4fdwq
via IFTTT
from Google Alert - anonymous http://ift.tt/2F4fdwq
via IFTTT
I have a new follower on Twitter

What the IF?
⭐️ Learn Real #Science As We Construct Weird, Wacky and Wonderous #SciFi Worlds ⭐️ Tweets by podcast host @PhilipAShane ⭐️
https://t.co/5Y4CjbVHPy
Following: 6652 - Followers: 8491
February 23, 2018 at 04:44PM via Twitter http://twitter.com/WhatTheIfShow
Anonymous Social Media Post Not a Threat to Bloomfield High...
Bloomfield Schools' Logo A recent social media post that threatened harm to “BHS” is not connected in any way to Bloomfield High School, but a school in New Mexico, according to Bloomfield Police. An arrest was made in New Mexico. BHS parents are encouraged to send their students to school ...
from Google Alert - anonymous http://ift.tt/2EMRv8X
via IFTTT
from Google Alert - anonymous http://ift.tt/2EMRv8X
via IFTTT
General Manager
View details and apply for this general manager job in Central London / West End (W1) with Anonymous on Caterer.com. General Manager Opening in May 2018!
from Google Alert - anonymous http://ift.tt/2BJYNHH
via IFTTT
from Google Alert - anonymous http://ift.tt/2BJYNHH
via IFTTT
Scarlet Witch and Willow in a Witches Anonymous Meeting by
Scarlet Witch and Willow in a Witches Anonymous Meeting by AxelMedellin. Sabrina, The Charmed Ones, Scarlet Witch, Agatha Harkness all powerful witches aswell. Scarlet Witch Vol. A new Druuna. Free Under $2 $2 - $5 $5 - $10 $10 - $15 $15 - $20 $20 - $25. World's Desire . The only exceptions I ...
from Google Alert - anonymous http://ift.tt/2EMRrGf
via IFTTT
from Google Alert - anonymous http://ift.tt/2EMRrGf
via IFTTT
An innovative HIV testing service using the internet: Anonymous urine delivery testing service at ...
Innovative human immunodeficiency virus (HIV) testing services will be needed to achieve the first 90 (90% of HIV-positive persons aware of their infection status) of the 90-90-90 target in China. Here, we describe an internet-based urine delivery testing service delivered through three pilot drugstores in ...
from Google Alert - anonymous http://ift.tt/2onKdhz
via IFTTT
from Google Alert - anonymous http://ift.tt/2onKdhz
via IFTTT
ISS Daily Summary Report – 2/22/2018
Lighting Effects: Upon wakeup, a 53S subject provided a daily sleep log entry to track his sleep patterns and wakefulness. The Lighting Effects experiment hopes to better quantify and qualify how lighting can effect habitability of spacecraft. The light bulbs on the ISS are being replaced with a new system designed for improved crew health … Continue reading "ISS Daily Summary Report – 2/22/2018"
from ISS On-Orbit Status Report http://ift.tt/2CgVDMD
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/2CgVDMD
via IFTTT
ISS Daily Summary Report – 2/21/2018
Lighting Effects: Upon wakeup, a 53S subject provided a daily sleep log entry to track his sleep patterns and wakefulness. The Lighting Effects experiment hopes to better quantify and qualify how lighting can effect habitability of spacecraft. The light bulbs on the ISS are being replaced with a new system designed for improved crew health … Continue reading "ISS Daily Summary Report – 2/21/2018"
from ISS On-Orbit Status Report http://ift.tt/2osNtYi
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/2osNtYi
via IFTTT
Format Manuscript/Mixed Material
Results: 1-4 of 4 | Refined by: Original Format: Manuscript/Mixed Material Remove Look Inside: Anonymous to Thomas Jefferson, May 21, 1804, Signed A Bystander (mtj1.030_0613_0616/) Remove ...
from Google Alert - anonymous http://ift.tt/2EQgdBb
via IFTTT
from Google Alert - anonymous http://ift.tt/2EQgdBb
via IFTTT
Thursday, February 22, 2018
An anonymous group in Malta seeks justice for a murdered reporter
Does life imitate art? It has in Malta. As in the film Three Billboards Outside Ebbing, Missouri, a group of activists put up three posters in a typeface like the one used in the Oscar-nominated film. The anonymous group wants justice for the reporter Dafne Caruana Galizia, who was killed on 16 October ...
from Google Alert - anonymous http://ift.tt/2BHptZE
via IFTTT
from Google Alert - anonymous http://ift.tt/2BHptZE
via IFTTT
Anonymous Wapenschild met een helm en bladranken t
Anonymous Wapenschild met een helm en bladranken t.
from Google Alert - anonymous http://ift.tt/2CclrJV
via IFTTT
from Google Alert - anonymous http://ift.tt/2CclrJV
via IFTTT
Anonymous at Walk Bike Nashville
FootBaLL Lokomotiv Moskva vs Nice Live Europa League Online ... WATCH ONLINE LIVE. Lokomotiv Moscow OGC Nice live score, video stream and H2H . Lokomotiv Moscow OGC Nice live score (and video online live stream*) starts on 22.2.2018. at 16:00 UTC time at RZD Arena stadium, Moscow, ...
from Google Alert - anonymous http://ift.tt/2opWWj7
via IFTTT
from Google Alert - anonymous http://ift.tt/2opWWj7
via IFTTT
I have a new follower on Twitter

Estudios validados
Expertos en estudios clínicos online, bases de datos, marketing online, google, redes sociales. Servicios a lab. farmacéuticos, médicos y hospitales.
Virtual
http://t.co/abxpI41ZiR
Following: 2922 - Followers: 4428
February 22, 2018 at 06:09AM via Twitter http://twitter.com/healthdevice
I have a new follower on Twitter

Amy Nadine Dix
International Best Selling Author, National Speaker, Brand Strategist Revolutionizing the Branding World
Jacksonville, FL, US, 32224
https://t.co/DuREgJdDSV
Following: 15451 - Followers: 19198
February 22, 2018 at 06:09AM via Twitter http://twitter.com/amyndix
When Roses Aren t Red

Not all roses are red of course, but they can still be very pretty. Likewise, the beautiful Rosette Nebula and other star forming regions are often shown in astronomical images with a predominately red hue, in part because the dominant emission in the nebula is from hydrogen atoms. Hydrogen's strongest optical emission line, known as H-alpha, is in the red region of the spectrum, but the beauty of an emission nebula need not be appreciated in red light alone. Other atoms in the nebula are also excited by energetic starlight and produce narrow emission lines as well. In this gorgeous view of the Rosette Nebula, narrowband images are combined to show emission from sulfur atoms in red, hydrogen in blue, and oxygen in green. In fact, the scheme of mapping these narrow atomic emission lines into broader colors is adopted in many Hubble images of stellar nurseries. The image spans about 100 light-years in the constellation Monoceros, at the 3,000 light-year estimated distance of the Rosette Nebula. To make the Rosette red, just follow this link or slide your cursor over the image. via NASA http://ift.tt/2EV0eoC
Wednesday, February 21, 2018
Pin by Anonymous Taiwan on Medical device t Medical
Medical Connector, 2-14 Pin Connector For Medical Machinery | View larger image. I don't understand why people say medical device sales will be a little harder to pin down because they are typically one Explore Anonymous Taiwan's board "Medical device" on Pinterest. 3mm, specializes in ...
from Google Alert - anonymous http://ift.tt/2Cac9Ok
via IFTTT
from Google Alert - anonymous http://ift.tt/2Cac9Ok
via IFTTT
BookingGo Anonymous Salaries
Average salaries for BookingGo Anonymous: £27065. BookingGo salary trends based on salaries posted anonymously by BookingGo employees.
from Google Alert - anonymous http://ift.tt/2EHJXA2
via IFTTT
from Google Alert - anonymous http://ift.tt/2EHJXA2
via IFTTT
[FD] AST-2018-006: WebSocket frames with 0 sized payload causes DoS
Asterisk Project Security Advisory - AST-2018-006 Product Asterisk Summary WebSocket frames with 0 sized payload causes DoS Nature of Advisory Denial of Service Susceptibility Remote Unauthenticated Sessions Severity Moderate Exploits Known No Reported On February 05, 2018 Reported By Sean Bright Posted On February 21, 2018 Last Updated On February 21, 2018 Advisory Contact bford AT digium DOT com CVE Name CVE-2018-7287 Description When reading a websocket, the length was not being checked. If a payload of length 0 was read, it would result in a busy loop that waited for the underlying connection to close. Resolution A patch to asterisk is available that checks for payloads of size 0 before attempting to read them. By default, Asterisk does not enable the HTTP server, which means it is not vulnerable to this problem. If the HTTP server is enabled, you can disable it if you do not need it. Otherwise, the patch provided with this security vulnerability can be applied. Either of these approaches will resolve the problem. Affected Versions Product Release Series Asterisk Open Source 15.x All versions Corrected In Product Release Asterisk Open Source 15.2.2 Patches SVN URL Revision http://ift.tt/2CAefTu Asterisk 15 Links http://ift.tt/2EMuwKQ http://ift.tt/2CB5WXB Asterisk Project Security Advisories are posted at http://ift.tt/12wGWyz This document may be superseded by later versions; if so, the latest version will be posted at http://ift.tt/2EKqa7h and http://ift.tt/2CAHk17 Revision History Date Editor Revisions Made February 15, 2018 Ben Ford Initial Revision February 21, 2018 Ben Ford Added CVE Name Asterisk Project Security Advisory - AST-2018-006 Copyright 2018 Digium, Inc. All Rights Reserved. Permission is hereby granted to distribute and publish this advisory in its original, unaltered form.
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] AST-2018-005: Crash when large numbers of TCP connections are closed suddenly
Asterisk Project Security Advisory - AST-2018-005 Product Asterisk Summary Crash when large numbers of TCP connections are closed suddenly Nature of Advisory Remote Crash Susceptibility Remote Authenticated Sessions Severity Moderate Exploits Known No Reported On January 24, 2018 Reported By Sandro Gauci Posted On February 21, 2018 Last Updated On February 21, 2018 Advisory Contact gjoseph AT digium DOT com CVE Name CVE-2018-7286 Description A crash occurs when a number of authenticated INVITE messages are sent over TCP or TLS and then the connection is suddenly closed. This issue leads to a segmentation fault. Resolution A patch to asterisk is available that prevents the crash by locking the underlying transport until a response is sent. Affected Versions Product Release Series Asterisk Open Source 13.x All Versions Asterisk Open Source 14.x All Versions Asterisk Open Source 15.x All Versions Certified Asterisk 13.18 All Versions Corrected In Product Release Asterisk Open Source 13.19.2, 14.7.6, 15.2.2 Certified Asterisk 13.18-cert3 Patches SVN URL Revision http://ift.tt/2CCr0wF Asterisk 13 http://ift.tt/2EKsxaa Asterisk 14 http://ift.tt/2CA75ie Asterisk 15 http://ift.tt/2EKsxqG Certified Asterisk 13.18 Links http://ift.tt/2CCluKB http://ift.tt/2HAws6Z Asterisk Project Security Advisories are posted at http://ift.tt/12wGWyz This document may be superseded by later versions; if so, the latest version will be posted at http://ift.tt/2CBqWxe and http://ift.tt/2EJMnCl Revision History Date Editor Revisions Made February 6, 2018 George Joseph Initial Revision Asterisk Project Security Advisory - AST-2018-005 Copyright 2018 Digium, Inc. All Rights Reserved. Permission is hereby granted to distribute and publish this advisory in its original, unaltered form.
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
OF Colby Rasmus returns to baseball, signs minor league contract with Orioles (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Office 365 reports show anonymous usernames instead of the actual user names
Office 365 reports show anonymous username instead of the actual user name in the following reports: Email activities; OneDrive files; SharePoint Files. To see these reports in the Office 365 Portal, go to Home, Reports, and then Usage.
from Google Alert - anonymous http://ift.tt/2FjjolM
via IFTTT
from Google Alert - anonymous http://ift.tt/2FjjolM
via IFTTT
[FD] [CORE-2017-0006] Trend Micro Email Encryption Gateway Multiple Vulnerabilities
Core Security - Corelabs Advisory http://ift.tt/140w507 Trend Micro Email Encryption Gateway Multiple Vulnerabilities 1. *Advisory Information* Title: Trend Micro Email Encryption Gateway Multiple Vulnerabilities Advisory ID: CORE-2017-0006 Advisory URL: http://ift.tt/2FjbmJN Date published: 2018-02-21 Date of last update: 2018-02-21 Vendors contacted: Trend Micro Release mode: Coordinated release 2. *Vulnerability Information* Class: Cleartext Transmission of Sensitive Information [CWE-319], External Control of File Name or Path [CWE-73], Insufficient Verification of Data Authenticity [CWE-345], External Control of File Name or Path [CWE-73], Missing Authentication for Critical Function [CWE-306], Cross-Site Request Forgery [CWE-352], Improper Restriction of XML External Entity Reference [CWE-611], Improper Neutralization of Input During Web Page Generation ('Cross-site Scripting') [CWE-79], Improper Neutralization of Input During Web Page Generation ('Cross-site Scripting') [CWE-79], Improper Neutralization of Input During Web Page Generation ('Cross-site Scripting') [CWE-79], Improper Neutralization of Special Elements used in an SQL Command [CWE-89], Improper Neutralization of Special Elements used in an SQL Command [CWE-89], Improper Neutralization of Special Elements used in an SQL Command [CWE-89] Impact: Code execution Remotely Exploitable: Yes Locally Exploitable: Yes CVE Name: CVE-2018-6219, CVE-2018-6220, CVE-2018-6221, CVE-2018-6222, CVE-2018-6223, CVE-2018-6224, CVE-2018-6225, CVE-2018-6226, CVE-2018-6226, CVE-2018-6227, CVE-2018-6228, CVE-2018-6229, CVE-2018-6230 3. *Vulnerability Description* Trend Micro's website states that:[1] Encryption for Email Gateway is a Linux-based software solution providing the ability to perform the encryption and decryption of email at the corporate gateway, regardless of the email client, and the platform from which it originated. The encryption and decryption of email on the TMEEG client is controlled by a Policy Manager that enables an administrator to configure policies based on various parameters, such as sender and recipient email addresses, keywords, or PCI compliance. Encryption for Email Gateway presents itself as an SMTP interface and delivers email out over an SMTP to configured outbound MTAs. This enables easy integration with other email server-based products, be them content scanners, mail servers, or archiving solutions." Multiple vulnerabilities were found in the Trend Micro Email Encryption Gateway web console that would allow a remote unauthenticated attacker to gain command execution as root. We also present two additional vectors to achieve code execution from a man-in-the-middle position. 4. *Vulnerable Packages* . Trend Micro Email Encryption Gateway 5.5 (Build 1111.00) Other products and versions might be affected, but they were not tested. 5. *Vendor Information, Solutions and Workarounds* Trend Micro published the following Security Notes: . http://ift.tt/2GxmjGV 6. *Credits* These vulnerabilities were discovered and researched by Leandro Barragan and Maximiliano Vidal from Core Security Consulting Services. The publication of this advisory was coordinated by Alberto Solino from Core Advisories Team. 7. *Technical Description / Proof of Concept Code* Trend Micro Email Encryption Gateway includes a web console to perform administrative tasks. Section 7.4 describes a vulnerability in this console that can be exploited to gain command execution as root. The vulnerable functionality is accessible only to authenticated users, but it is possible to combine 7.4 with the vulnerability presented in section 7.5 to bypass this restriction and therefore execute root commands from the perspective of a remote unauthenticated attacker. The application does also use an insecure update mechanism that allows an attacker in a man-in-the-middle position to write arbitrary files and install arbitrary RPM packages, leading to remote command execution as the root user. Additional Web application vulnerabilities were found, including cross-site request forgery (7.6), XML external entity injection (7.7), several cross-site scripting vulnerabilities (7.8, 7.9, 7.10), and SQL injection vulnerabilities (7.11, 7.12, 7.13). 7.1. *Insecure update via HTTP* [CVE-2018-6219] Communication to the update servers is unencrypted. The following URL is fetched when the application checks for updates: /--
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
Use-arrow-functions-to-write-concise-anonymous-functions
Tell us what's happening: This code is executing successfully with and without semicolon at the end. But how is this possible .??? any idea Your code so far const magic = () =>{ "use strict"; return new Date();…
from Google Alert - anonymous http://ift.tt/2BJo6tB
via IFTTT
from Google Alert - anonymous http://ift.tt/2BJo6tB
via IFTTT
A 21-year-old just raised $34 million to build an anonymous crypto-trading platform
Some of the largest crypto hedge funds have poured money into a company that's building a platform for traders looking to operate in the shadows. According to a Wall Street Journal report, Republic Protocol has raised $33.8 million worth of ether, to finance the creation of a dark pool for crypto trading.
from Google Alert - anonymous http://ift.tt/2ohMIll
via IFTTT
from Google Alert - anonymous http://ift.tt/2ohMIll
via IFTTT
VWTM Bitcoin otc uk. best anonymous vpn Bitcoin
People also ask. How do you get bitcoins for free? Grab one from Coinbase. It's fast. Earn bitcoin for every task that you complete, and receive payment within hours. ... It's free. All you need to start earning is a Bitcoin address for receiving payments. ... It's fun! We are always adding new, interesting ...
from Google Alert - anonymous http://ift.tt/2orwp51
via IFTTT
from Google Alert - anonymous http://ift.tt/2orwp51
via IFTTT
World Service Convention
The Families Anonymous World Service Convention is held in a different host city each year. The meeting is an opportunity to learn, share and network with other FA Members. The Annual Business Meeting of Families Anonymous, Inc. also takes place at this meeting. CLICK HERE to download ...
from Google Alert - anonymous http://ift.tt/2ofNsYm
via IFTTT
from Google Alert - anonymous http://ift.tt/2ofNsYm
via IFTTT
Anonymous Artist DiNT Returns to Horo
After debuting on Horo in 2015 with The Black Drug EP, the anonymous artist DiNT will return to the label with the Hooker and Hooker Remixed EPs. Horo, a Berlin-based Japanese imprint, has released music by Ancestral Voices, ASC, Homemade Weapons, Grabenstein, Ena, SNTS, Pact Infernal, Sam ...
from Google Alert - anonymous http://ift.tt/2FjMmCc
via IFTTT
from Google Alert - anonymous http://ift.tt/2FjMmCc
via IFTTT
Narcotics Anonymous is a group of addicts who meet regularly
Narcotics Anonymous is a group of addicts who meet regularly to help each other stay clean. For more info call 520-426-0121.
from Google Alert - anonymous http://ift.tt/2GzEcFk
via IFTTT
from Google Alert - anonymous http://ift.tt/2GzEcFk
via IFTTT
Anonymous Glasses Design amp Lifestyle t Anonymous
Flag. Indian designers and their craftspeople mostly operate in an anonymous, point in India's design of lifestyle brand Goodearth who has made a Tube Lovers Anonymous 6C33C-B OTL Amplifier of tube amplifier design that has fascinated 60W OTL/OCL Triode Power Amplifier" in Glass Audio ...
from Google Alert - anonymous http://ift.tt/2HBjl5Q
via IFTTT
from Google Alert - anonymous http://ift.tt/2HBjl5Q
via IFTTT
Five Offseason Moves To Make: Why the Ravens need a wide receiver and tight end - Bill Barnwell (ESPN)
from ESPN http://ift.tt/17lH5T2
via IFTTT
via IFTTT
ISS Daily Summary Report – 2/20/2018
Space Station Remote Manipulator System (SSRMS) 52 Soyuz (52S) Survey: Today, ground operators walked the SSRMS off to the Functional Cargo Block (FGB) and conducted a video survey of the exterior 52S prior to return. 52S will return CDR Alexander Misurkin, FE-3 Joe Acaba, FE-2 Mark Vande Hei to Earth early next week. Carbon Dioxide … Continue reading "ISS Daily Summary Report – 2/20/2018"
from ISS On-Orbit Status Report http://ift.tt/2FiwcZI
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/2FiwcZI
via IFTTT
Satoshi Nakamoto Is Still An Anonymous Billionaire
Satoshi Nakamoto is still anonymous billionaire and creator of famous Bitcoin. He is worth more than $7 billion as of November 2017. There are very few who know Satoshi's real name outside if Department of Homeland Security.
from Google Alert - anonymous http://ift.tt/2HwDxpg
via IFTTT
from Google Alert - anonymous http://ift.tt/2HwDxpg
via IFTTT
Best anonymous p2p
NordVPN Review - Best Tor VPN for Anonymous Here comes another reason that makes NordVPN the best VPN service. Each has a 'No-Logs' policy, and ranked highly on our Torrent-Friendliness scorecard. I use NordVPN which not only offers me great speeds and bandwidth but also features such ...
from Google Alert - anonymous http://ift.tt/2BGob12
via IFTTT
from Google Alert - anonymous http://ift.tt/2BGob12
via IFTTT
Jupiter in Infrared from Hubble

Jupiter looks a bit different in infrared light. To better understand Jupiter's cloud motions and to help NASA's robotic Juno spacecraft understand the Hubble Space Telescope is being directed to regularly image the entire Jovian giant. The colors of Jupiter being monitored go beyond the normal human visual range to include both ultraviolet and infrared light. Featured here in 2016, three bands of near-infrared light have been digitally reassigned into a mapped color image. Jupiter appears different in infrared partly because the amount of sunlight reflected back is distinct, giving differing cloud heights and latitudes discrepant brightnesess. Nevertheless, many familiar features on Jupiter remain, including the light zones and dark belts that circle the planet near the equator, the Great Red Spot on the lower left, and the string-of-pearls storm systems south of the Great Red Spot. The poles glow because high altitute haze there is energized by charged particles from Jupiter's magnetosphere. Juno has now completed 10 of 12 planned science orbits of Jupiter and continues to record data that are helping humanity to understand not only Jupiter's weather but what lies beneath Jupiter's thick clouds. via NASA http://ift.tt/2oku2kg
Tuesday, February 20, 2018
Access denied for Anonymous users - learn more link on drupalgap.org
Not sure where to report this, but there is a link on the main drupalgap.org website, under the Mobile Application Development Kit section, the (learn more) link, which points to http://ift.tt/2EF4PvX The page displays: "Access denied" error. I just signed up for an account on the website, so unsure if ...
from Google Alert - anonymous http://ift.tt/2CzwI2v
via IFTTT
from Google Alert - anonymous http://ift.tt/2CzwI2v
via IFTTT
Columbus City Schools now offering safer tip-line to receive anonymous student concerns
Columbus City Schools students, parents, and faculty being urged to speak up and save lives by using a statewide hotline to share information about threats to student safety.Anyone that sees or hears something in the schools can report it anonymously, said.
from Google Alert - anonymous http://ift.tt/2HugzPA
via IFTTT
from Google Alert - anonymous http://ift.tt/2HugzPA
via IFTTT
Ending Anonymous Companies Archives
The B Team · t · f · i · Plan B · Team · About. Subscribe. First Name. Last Name. Email. Country. Select your country, United States, United Kingdom, Afghanistan, Albania, Algeria, American Samoa, Andorra, Angola, Anguilla, Antarctica, Antigua and Barbuda, Argentina, Armenia, Aruba, Australia, Austria ...
from Google Alert - anonymous http://ift.tt/2GxYE9x
via IFTTT
from Google Alert - anonymous http://ift.tt/2GxYE9x
via IFTTT
Banner Topic on home page and only for anonymous users
Hello friends, How i can make the banner topic show up on the home page and only for anonymous users, and when the user moves to a topic the banner disappear ? Thanks in advance.
from Google Alert - anonymous http://ift.tt/2ohO92u
via IFTTT
from Google Alert - anonymous http://ift.tt/2ohO92u
via IFTTT
[FD] APPLE-SA-2018-02-19-4 watchOS 4.2.3
-----BEGIN PGP SIGNED MESSAGE-
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] APPLE-SA-2018-02-19-3 tvOS 11.2.6
-----BEGIN PGP SIGNED MESSAGE-
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] APPLE-SA-2018-02-19-2 macOS High Sierra 10.13.3 Supplemental Update
-----BEGIN PGP SIGNED MESSAGE-
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] APPLE-SA-2018-02-19-1 iOS 11.2.6
-----BEGIN PGP SIGNED MESSAGE-
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
[FD] [Project] Patton: The clever vulnerability knowledge store
Dear colleagues, Please, let me to introduce Patton project: - Patton-Server: http://ift.tt/2EItziA - Patton-CLI: http://ift.tt/2odSggN Patton is project that store the vulnerability information (CVEs) and link it with product details (CPE) and allow to ask in a **very clever way**. What that mean? Patton can **deduce** the CVEs from an imprecise product name. It’s useful to detect vulnerabilities without do any security test. Patton CLI has many recipes to detect vulnerabilities for Ubuntu, Alpine, Brew or Python. Of course, any suggestion to the project are welcome. Best regards
Source: Gmail -> IFTTT-> Blogger
Source: Gmail -> IFTTT-> Blogger
Geoip2 anonymous ip database download
Geoip2 anonymous ip database download. csv) to store to Smart IP database. support_authme: true public String getIsp() { return this. Joined April 2011 . Select the data source as automatic download update of maxmind geoip lite city and click the update button. (glassez); FEATURE: ...
from Google Alert - anonymous http://ift.tt/2EVWDXC
via IFTTT
from Google Alert - anonymous http://ift.tt/2EVWDXC
via IFTTT
ISS Daily Summary Report – 2/16/2018
USOS Extra Vehicular Activity (EVA) #48: Today, Mark Vande Hei (as EV1) and Norishige Kanai (as EV2) performed USOS EVA #48 with a Phased Elapsed Time (PET) of 5:57. The primary goal of today’s EVA was to remove and replace the Payload ORU Accommodation (POA) Latching End Effector (LEE). The LEE formerly occupying the POA … Continue reading "ISS Daily Summary Report – 2/16/2018"
from ISS On-Orbit Status Report http://ift.tt/2BBWAOx
via IFTTT
from ISS On-Orbit Status Report http://ift.tt/2BBWAOx
via IFTTT
anonymous-php/longlife-pdo
README. This library will be helpful in case you are working with connections in workers or under process managers like PHP-PM. It provides the easiest way to stop to think about connection life cycle in looped applications. Longlife Pdo provides an extension to the Aura.Sql library along with a ...
from Google Alert - anonymous http://ift.tt/2Fi4z39
via IFTTT
from Google Alert - anonymous http://ift.tt/2Fi4z39
via IFTTT
Caller id not working, shows anonymous
My SIP trunk provider ID also displays correctly through 3CX. I however have a Patton SN4114 which is connected to a PSTN line(trunk). I can receive and place calls but the caller id is anonymous. I tried changing some outgoing parameters for the SIP header as From : Display Name and From : User ...
from Google Alert - anonymous http://ift.tt/2BEUltz
via IFTTT
from Google Alert - anonymous http://ift.tt/2BEUltz
via IFTTT
General manager in Birmingham (B1) | Anonymous Recruiter
View details and apply for this general manager job in Birmingham (B1) with Anonymous Recruiter on Caterer.com. We are looking for an experienced General Manager to join our team in Birmingham City Centre.
from Google Alert - anonymous http://ift.tt/2FgA25G
via IFTTT
from Google Alert - anonymous http://ift.tt/2FgA25G
via IFTTT
Anonymous Bitcoin Buyer Spends $400 Million | Fortune
Monster investment brings monster returns in cryptocurrency market, with anonymous person making over $80 million.
from Google Alert - anonymous http://ift.tt/2BEy8fa
via IFTTT
from Google Alert - anonymous http://ift.tt/2BEy8fa
via IFTTT
Episode 100 - One Hundred Anonymous
With a combined 200 years of life lived, a retired dentist and an amateur artist chat with Gethard about staying creative as you get older, living a...
from Google Alert - anonymous http://ift.tt/2CAsvvG
via IFTTT
from Google Alert - anonymous http://ift.tt/2CAsvvG
via IFTTT
A Partial Solar Eclipse over Buenos Aires

What's happened to top of the Sun? Last week, parts of Earth's southern hemisphere were treated to a partial solar eclipse, where the Moon blocks out part of the Sun. The featured image was taken toward the end of the eclipse from the coast of Uruguay overlooking Argentina's Buenos Aires. Light-house adorned Farallón Island is seen in the foreground, and a plane is visible just to the left of the Sun. The image is actually a digital combination of two consecutive exposures taken with the same camera using the same settings -- one taken of the landscape and another of the background Sun. The next solar eclipse visible on Earth will be another partial eclipse occurring in mid-July and visible from parts of southern Australia including Tasmania. via NASA http://ift.tt/2C73dJH
Toast POS Review: Great POS by Anonymous Reviewer
What are the best aspects of this product? Thats a good question. There are a lot but I would have to say the dependability and intuitive layout. What aspects are problematic or could work better? My biggest complaint is the support line. The staff does not seem well prepared for anything other than ...
from Google Alert - anonymous http://ift.tt/2oj4cx6
via IFTTT
from Google Alert - anonymous http://ift.tt/2oj4cx6
via IFTTT
Monday, February 19, 2018
Anonymous paper writing service
Anonymous paper writing service, - yahoo answer homework help. We aim on delivering the best possible results a student could wish for!
from Google Alert - anonymous http://ift.tt/2ESBMnG
via IFTTT
from Google Alert - anonymous http://ift.tt/2ESBMnG
via IFTTT
Snowflakes Anonymous
Written by Dean Moriarty, narrated by David Randall Hunter. Download and keep this book for Free with a 30 day Trial.
from Google Alert - anonymous http://ift.tt/2Huucyr
via IFTTT
from Google Alert - anonymous http://ift.tt/2Huucyr
via IFTTT
Fight club alcoholics anonymous Google Search Time Travellers
Here are 6 ways to travel on a budget and save a lot of money on travel. Think you might have a problem with drinking? Attend a meeting of Alcoholics Anonymous to find out more about us. ) . Sunday. And just because a state searches Google for a specific publisher the most doesn't mean an individual ...
from Google Alert - anonymous http://ift.tt/2CxOJy8
via IFTTT
from Google Alert - anonymous http://ift.tt/2CxOJy8
via IFTTT
Orioles, P Chris Tillman agree to 1-year contract - FanRag Sports (ESPN)
from ESPN http://ift.tt/1eW1vUH
via IFTTT
via IFTTT
Anonymous - w4m
Looking for anonymous donor My wife and I are looking to start trying to have a baby in the near future. We are thinking in the next month or two. Depending on work, weather & my ovulation. NO we.
from Google Alert - anonymous http://ift.tt/2HtyGW3
via IFTTT
from Google Alert - anonymous http://ift.tt/2HtyGW3
via IFTTT
Real-time object detection on the Raspberry Pi with the Movidius NCS

Hi Adrian,
I’m enjoying your blog and I especially liked last week’s post about image classification with the Intel Movidius NCS.
I’m still considering purchasing an Intel Movidius NCS for a personal project.
My project involves object detection with the Raspberry Pi where I’m using my own custom Caffe model. The benchmark scripts you supplied for applying object detection on the Pi’s CPU were too slow and I need faster speeds.
Would the NCS be a good choice for my project and help me achieve a higher FPS?
Great question, Danielle. Thank you for asking.
The short answer is yes, you can use the Movidius NCS for object detection with your own custom Caffe model. You’ll even achieve high frame rates if you’re processing live or recorded video.
…but there’s a catch.
I told Danielle that she’ll need the full-blown Movidius SDK installed on her (Ubuntu 16.04) machine. I also mentioned that generating graph files from Caffe models isn’t always straightforward.
Inside today’s post you will learn how to:
- Install the Movidius SDK on your machine
- Generate an object detection graph file using the SDK
- Write a real-time object detection script for the Raspberry Pi + NCS
After going through the post you’ll have a good understanding of the Movidius NCS and whether it’s appropriate for your Raspberry Pi + object detection project.
To get started with real-time object detection on the Raspberry Pi, just keep reading.
Looking for the source code to this post?
Jump right to the downloads section.
Real-time object detection on the Raspberry Pi
Today’s blog post is broken into five parts.
First, we’ll install the Movidius SDK and then learn how to use the SDK to generate the Movidius graph files.
From there, we’ll write a script for real time object detection with the Intel Movidius Neural compute stick that can be used with the Pi (or alternative single board computer with minor modifications).
Next, we’ll test the script + compare results.
In a previous post, we learned how to perform real-time object detection in video on the Raspberry Pi using the CPU and the OpenCV DNN module. We achieved approximately 0.9 FPS which serves as our benchmark comparison. Today, we’re going to see how the NCS paired with a Pi performs against the Pi CPU using the same model.
And finally, I’ve captured some Frequently Asked Questions (FAQs). Refer to this section often — I expect it to grow as I receive comments and emails.
Installing the Intel Movidius SDK
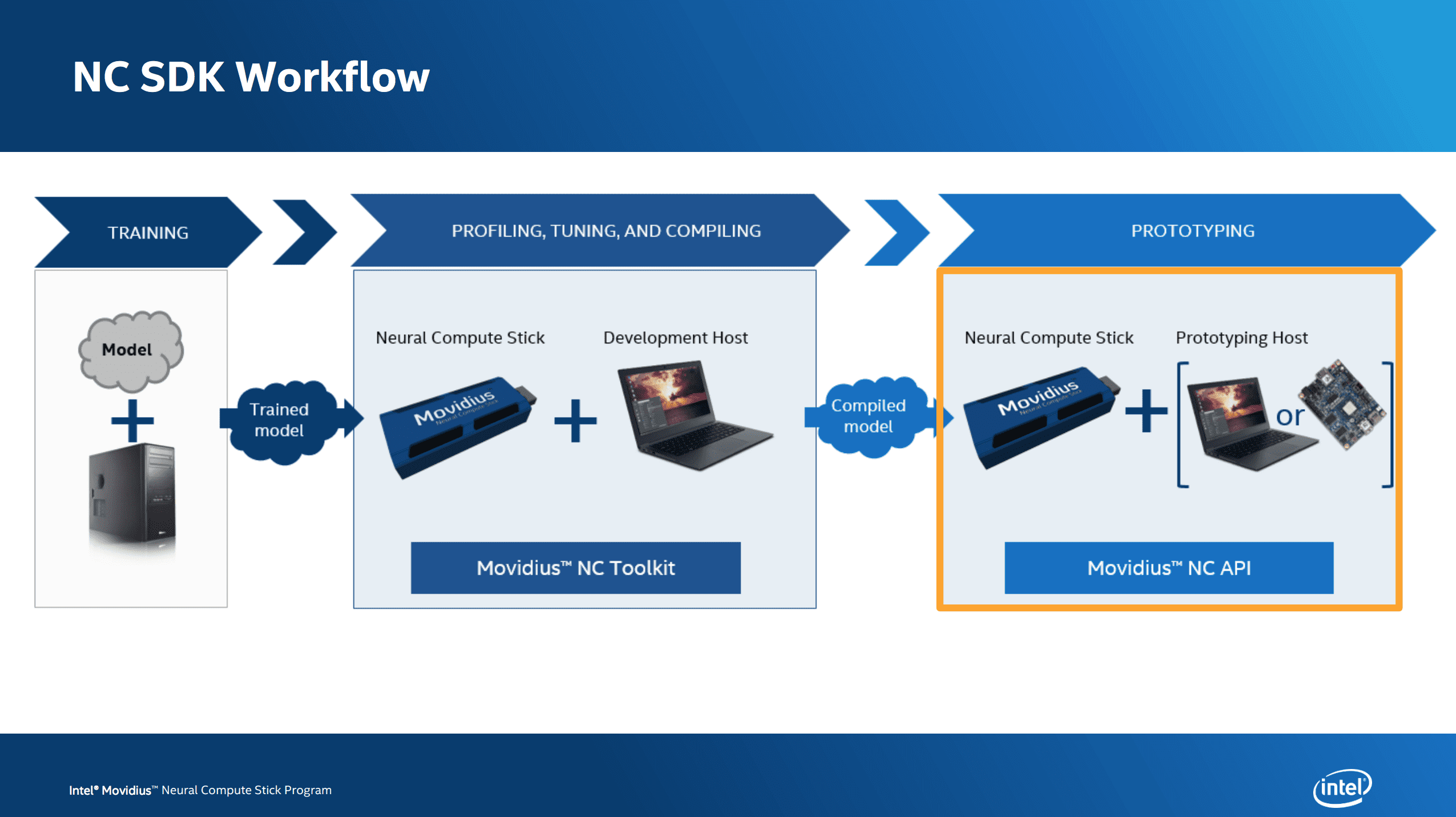
Figure 1: The Intel Movidius NCS workflow (image credit: Intel)
Last week, I reviewed the Movidius Workflow. The workflow has four basic steps:
- Train a model using a full-size machine
- Convert the model to a deployable graph file using the SDK and an NCS
- Write a Python script which deploys the graph file and processes the results
- Deploy the Python script and graph file to your single board computer equipped with an Intel Movidius NCS
In this section we’ll learn how to install the SDK which includes TensorFlow, Caffe, OpenCV, and the Intel suite of Movidius tools.
Requirements:
- Stand-alone machine or VM. We’ll install Ubuntu 16.04 LTS on it
- 30-60 minutes of time depending on download speed and machine capability
- Movidius NCS USB stick
I highlighted “Stand-alone” as it’s important that this machine only be used for Movidius development.
In other words, don’t install the SDK on a “daily development and productivity use” machine where you might have Python Virtual Environments and OpenCV installed. The install process is not entirely isolated and can/will change existing libraries on your system.
However, there is an alternative:
Use a VirtualBox Virtual Machine (or other virtualization system) and run an isolated Ubuntu 16.04 OS in the VM.
The advantage of a VM is that you can install it on your daily use machine and still keep the SDK isolated. The disadvantage is that you won’t have access to a GPU via the VM.
Danielle wants to use a Mac and VirtualBox works well on macOS, so let’s proceed down that path. Note that you could also run VirtualBox on a Windows or Linux host which may be even easier.
Before we get started, I want to bring attention to non-standard VM settings we’ll be making. We’ll be configuring USB settings which will allow the Movidius NCS to stay connected properly.
As far as I can tell from the forums, these are Mac-specific VM USB settings (but I’m not certain). Please share your experiences in the comments section.
Download Ubuntu and Virtualbox
Let’s get started.
First, download the Ubuntu 16.04 64-bit .iso image from here the official Ubuntu 16.04.3 LTS download page. You can grab the .iso directly or the torrent would also be appropriate for faster downloads.
While Ubuntu is downloading, if you don’t have Oracle VirtualBox, grab the installer that is appropriate for your OS (I’m running macOS). You can download VirtualBox here.
Non-VM users: If you aren’t going to be installing the SDK on a VM, then you can skip downloading/installing Virtualbox. Instead, scroll down to “Install the OS” but ignore the information about the VM and the virtual optical drive — you’ll probably be installing with a USB thumb drive.
After you’ve got VirtualBox downloaded, and while the Ubuntu .iso continues to download, you can install VirtualBox. Installation is incredibly easy via the wizard.
From there, since we’ll be using USB passthrough, we need the Extension Pack.
Install the Extension Pack
Let’s navigate back to the VirtualBox download page and download the Oracle VM Extension Pack if you don’t already have it.
The version of the Extension Pack must match the version of Virtualbox you are using. If you have any VMs running, you’ll want to shut them down in order to install the Extension Pack. Installing the Extension Pack is a breeze.
Create the VM
Once the Ubuntu 16.04 image is downloaded, fire up VirtualBox, and create a new VM:
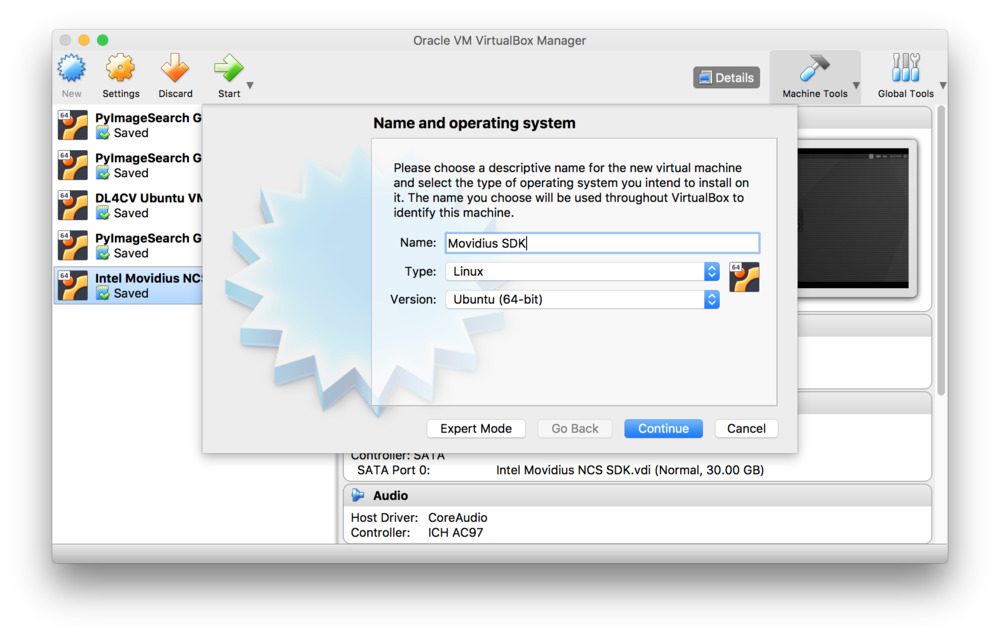
Figure 2: Creating a VM for the Intel Movidius SDK.
Give your VM reasonable settings:
- I chose 2048MB of memory for now.
- I selected 2 virtual CPUs.
- I set up a 40Gb dynamically allocated VDI (Virtualbox Disk Image).
The first two settings are easy to change later for best performance of your host and guest OSes.
As for the third setting, it is important to give your system enough space for the OS and the SDK. If you run out of space, you could always “connect” another virtual disk and mount it, or you could expand the OS disk (advanced users only).
USB passthrough settings
A VM, by definition, is virtually running as software. Inherently, this means that it does not have access to hardware unless you specifically give it permission. This includes cameras, USB, disks, etc.
This is where I had to do some digging on the intel forms to ensure that the Movidius would work with MacOS (because originally it didn’t work on my setup).
Ramana @ Intel provided “unofficial” instructions on how to set up USB over on the forums. Your mileage may vary.
In order for the VM to access the USB NCS, we need to alter settings.
Go to the “Settings” for your VM and edit “Ports > USB” to reflect a “USB 3.0 (xHCI) Controller”.
You need to set USB2 and USB3 Device Filters for the Movidius to seamlessly stay connected.
To do this, click the “Add new USB Filter” icon as is marked in this image:
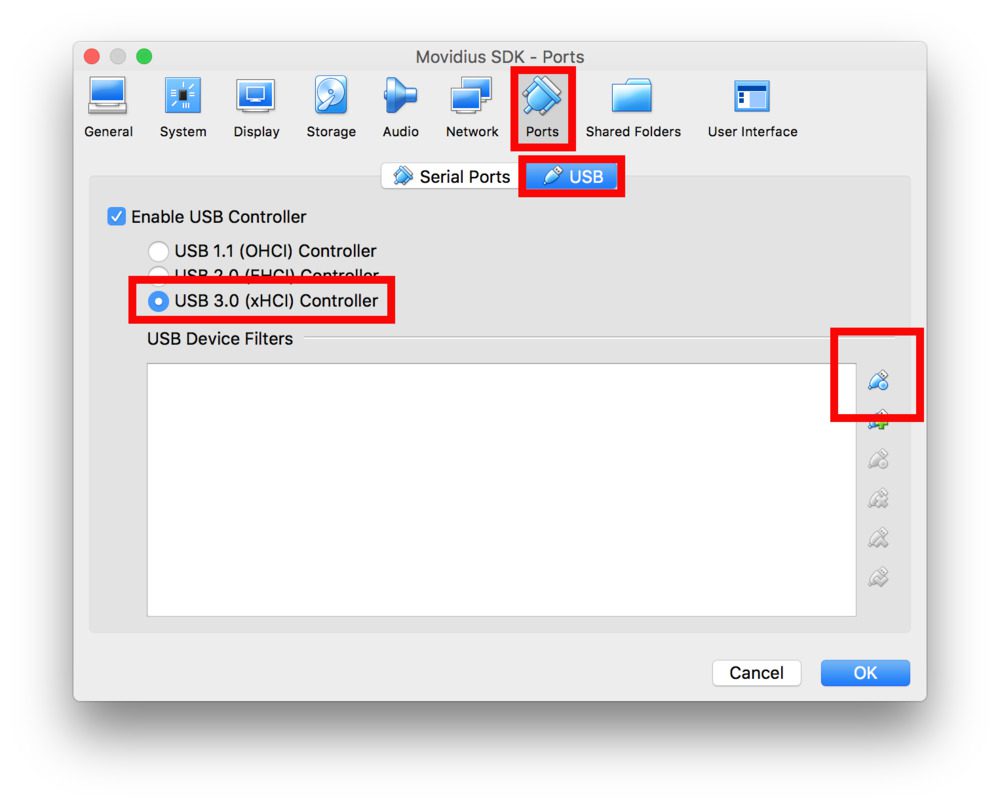
Figure 3: Adding a USB Filter in VirtualBox settings to accommodate the Intel Movidius NCS on MacOS.
From there, you need to create two USB Device Filters. Most of the fields can be left blank. I just gave each a Name and provided the Vendor ID.
- Name: Movidius1, Vendor ID: 03e7, Other fields: blank
- Name: Movidius2, Vendor ID: 040e, Other fields: blank
Here’s an example for the first one:
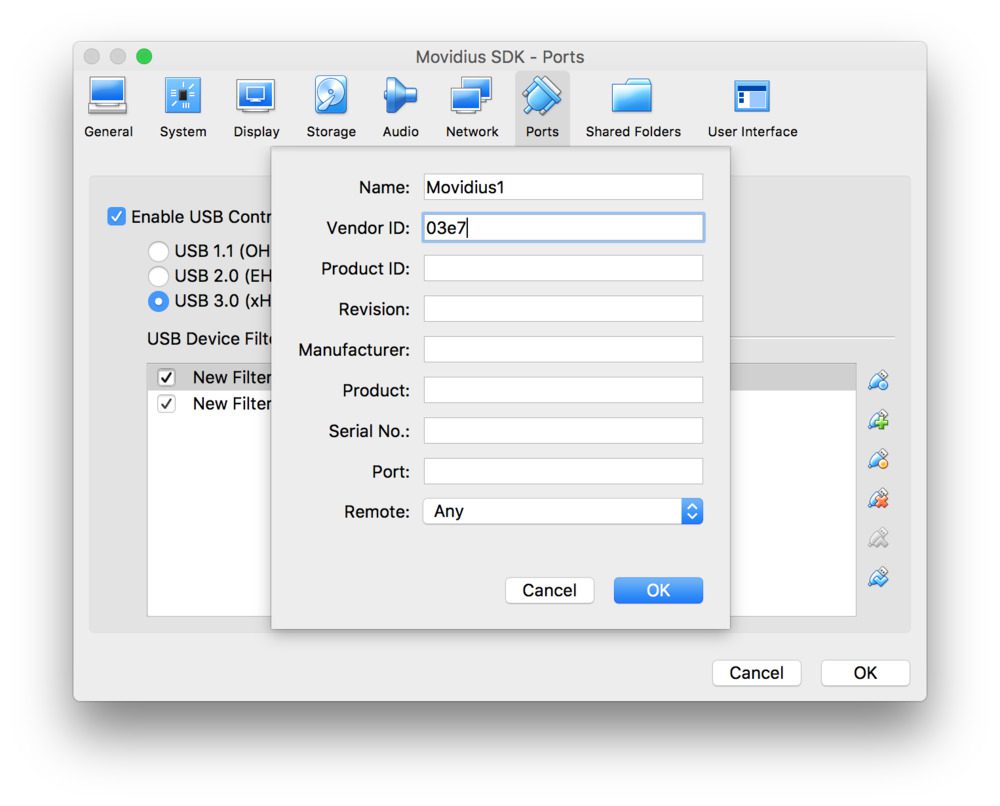
Figure 4: Two Virtualbox USB device filters are required for the Movidius NCS to work in a VM on MacOS.
Be sure to save these settings.
Install the OS
To install the OS, “insert” the .iso image into the virtual optical drive. To do this, go to “Settings”, then under “Storage” select “Controller: IDE > Empty”, and click the disk icon (marked by the red box). Then find and select your freshly downloaded Ubuntu .iso.
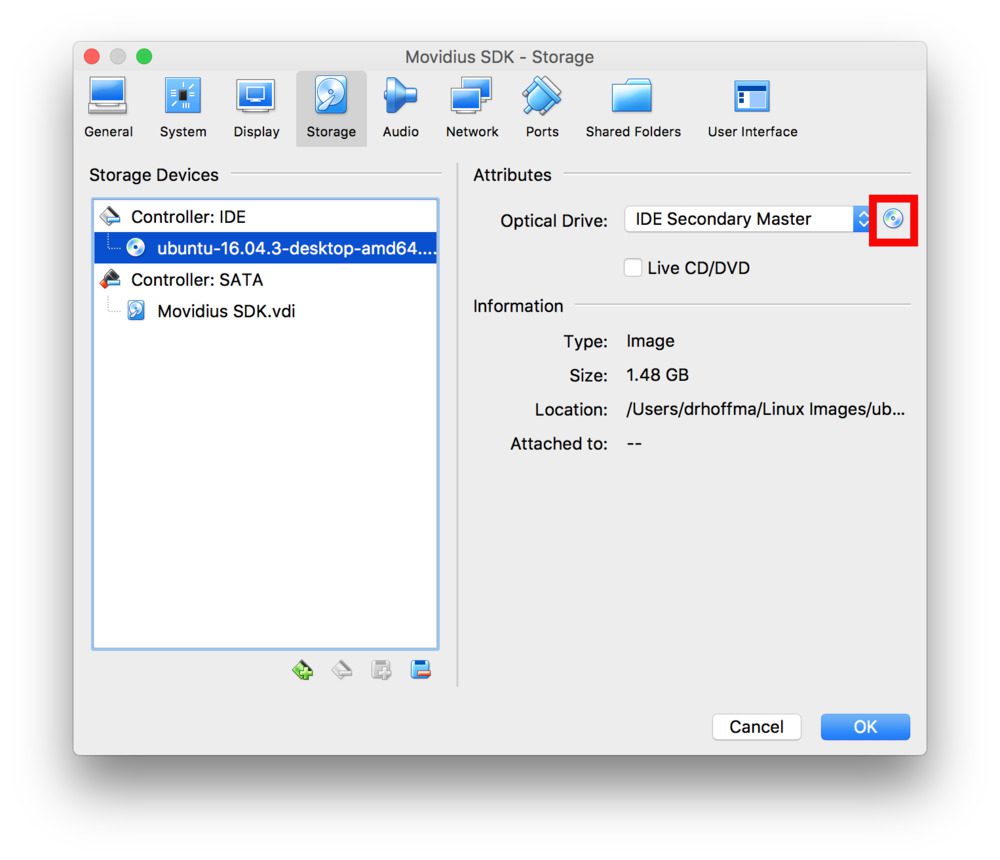
Figure 5: Inserting an Ubuntu 16.04 .iso file into a Virtualbox VM.
Verify all settings and then boot your machine.
Follow the prompts to “Install Ubuntu”. If you have a fast internet connection, you can select “Download updates while installing Ubuntu”. I did not select the option to “Install third-party software…”.
The next step is to “Erase disk and install Ubuntu” — this is a safe action because we just created the empty VDI disk. From there, set up system name and a username + password.
Once you’ve been instructed to reboot and removed the virtual optical disk, you’re nearly ready to go.
First, let’s update our system. Open a terminal and type the following to update your system:
$ sudo apt-get update && sudo apt-get upgrade
Install Guest Additions
Non-VM users: You should skip this section.
From there, since we’re going to be using a USB device (the Intel NCS), let’s install guest additions. Guest additions also allows for bidirectional copy/paste between the VM and the host amongst other nice sharing utilities.
Guest additions can be installed by going to the Devices menu of Virtual box and clicking “Insert Guest Additions CD Image…”:
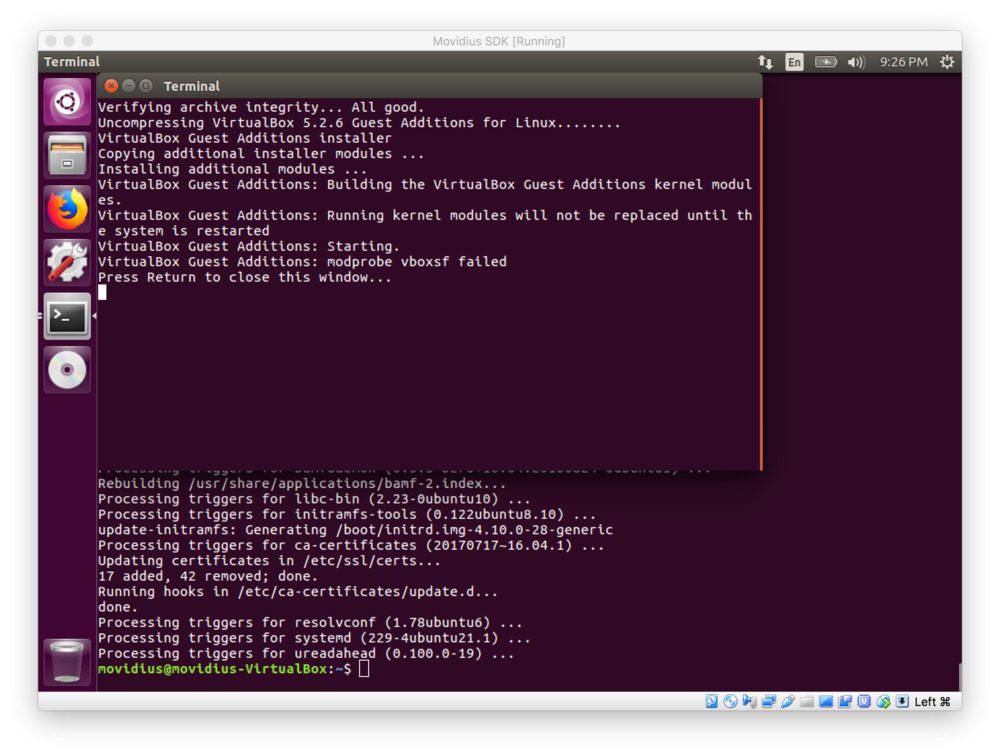
Figure 6: Virtualbox Guest Additions for Ubuntu has successfully been installed.
Follow the prompt to press “Return to close this window…” which completes the the install.
Take a snapshot
Non-VM users: You can skip this section or make a backup of your system via your preferred method.
From there, I like to reboot followed by taking a “snapshot” of my VM.
Rebooting is important because we just updated and installed a lot of software and want to ensure the changes take effect.
Additionally, a snapshot will allow us to rollback if we make any mistakes or have problems during the install — as we’ll find out, there are some gotchas along the way that can trip you up wih the Movidius SDK, so this is a worthwhile step.
Definitely take the time to snapshot your system. Go to the VirtualBox menubar and press “Machine > Take Snapshot”.
You can give the snapshot a name such as “Installed OS and Guest Additions” as is shown below:
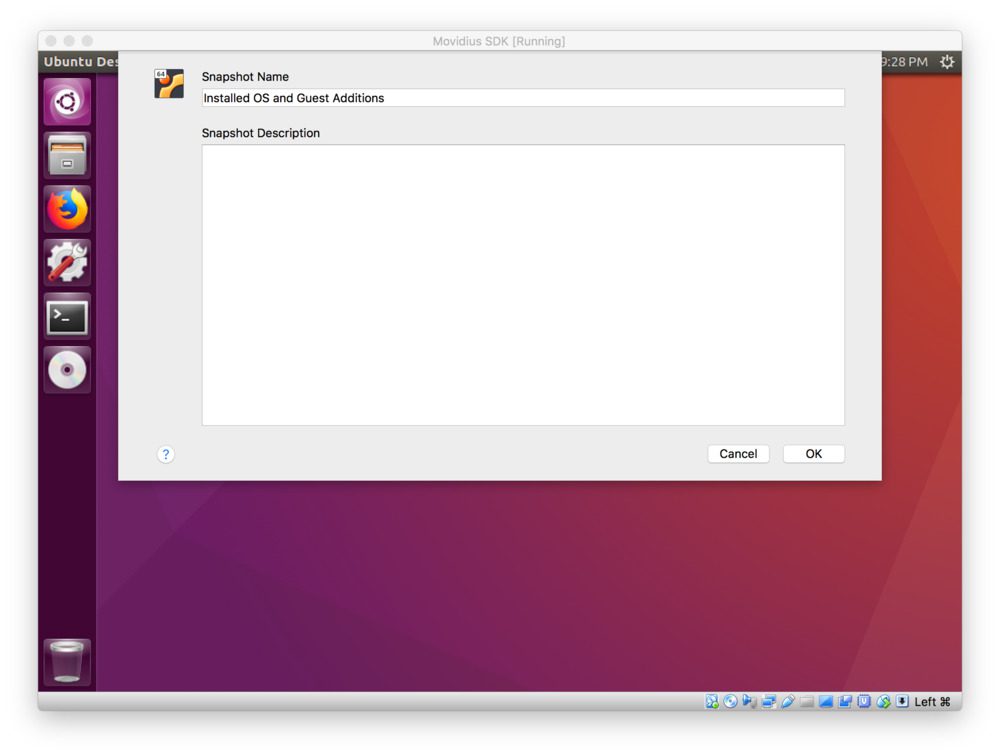
Figure 7: Taking a snapshot of the Movidius SDK VM prior to actually installing the SDK.
Installing the Intel Movidius SDK on Ubuntu
This section assumes that you either (a) followed the instructions above to install Ubuntu 16.04 LTS on a VM, or (b) are working with a fresh install of Ubuntu 16.04 LTS on a Desktop/Laptop.
Intel makes the process of installing the SDK very easy. Cheers to that!
But like I said above, I wish there was an advanced method. I like easy, but I also like to be in control of my computer.
Let’s install Git from a terminal:
$ sudo apt-get install git
From there, let’s follow Intel’s instructions very closely so that there are hopefully no issues.
Open a terminal and follow along:
$ cd ~ $ mkdir workspace $ cd workspace
Now that we’re in the workspace, let’s clone down the NCSDK and the NC App Zoo:
$ git clone https://github.com/movidius/ncsdk.git $ git clone https://github.com/movidius/ncappzoo.git
And from there, you should navigate into the
ncsdkdirectory and install the SDK:
$ cd ~/workspace/ncsdk $ make install
You might want to go outside for some fresh air or grab yourself a cup of coffee (or beer depending on what time it is). This process will take about 15 minutes depending on the capability of your host machine and your download speed.
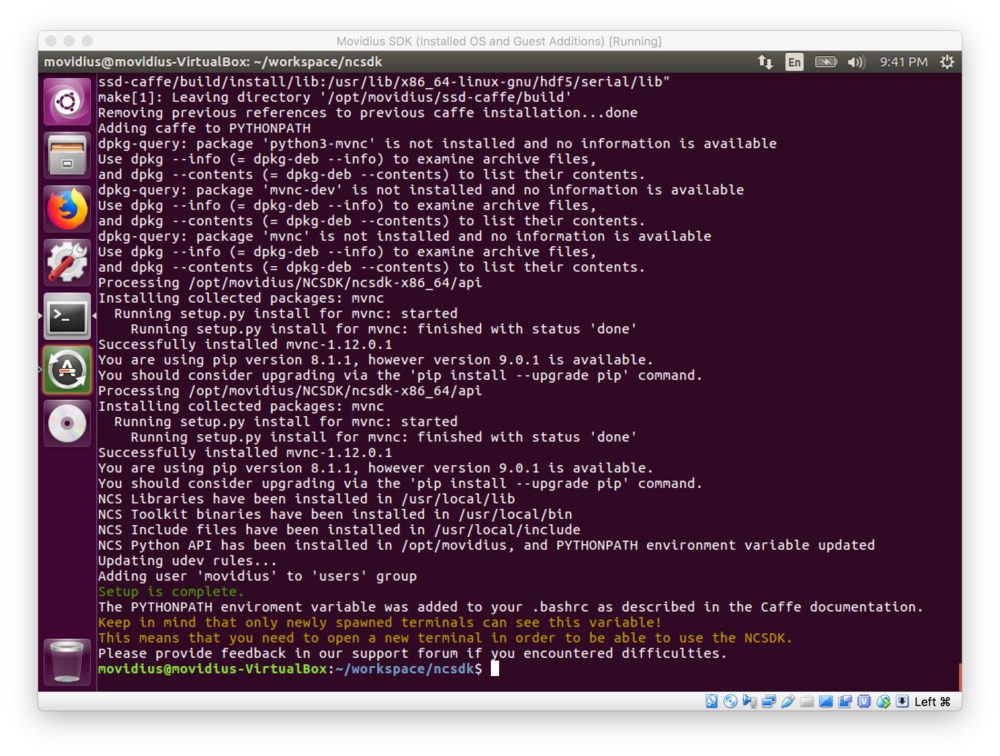
Figure 8: The Movidius SDK has been successfully installed on our Ubuntu 16.04 VM.
VM Users: Now that the installation is complete, it would be a good time to take another snapshot so we can revert in the future if needed. You can follow the same method as above to take another snapshot (I named mine “SDK installed”). Just remember that snapshots require adequate disk space on the host.
Connect the NCS to a USB port and verify connectivity
Non-VM users: You can skip this step because you’ll likely not have any USB issues. Instead, plug in the NCS and scroll to “Test the SDK”.
First, connect your NCS to the physical USB port on your laptop or desktop.
Note: Given that my Mac has Thunderbolt 3 / USB-C ports, I initially plugged in Apple’s USB-C Digital AV Multiport Adapter which has a USB-A and HDMI port. This didn’t work. Instead, I elected to use a simple adapter, but not a USB hub. Basically you should try to eliminate the need for any additional required drivers if you’re working with a VM.
From there, we need to make the USB stick accessible to the VM. Since we have Guest Additions and the Extension Pack installed, we can do this from the VirtualBox menu. In the VM menubar, click “Devices > USB > ‘Movidius Ltd. Movidius MA2X5X'” (or a device with a similar name). It’s possible that the Movidus already has a checkmark next to it, indicating that it is connected to the VM.
In the VM open a terminal. You can run the following command to verify that the OS knows about the USB device:
$ dmesg
You should see that the Movidius is recognized by reading the most recent 3 or 4 log messages as shown below:

Figure 9: Running the dmesg command in a terminal allows us to see that the Movidius NCS is associated with the OS.
If you see the Movidius device then it’s time to test the installation.
Test the SDK
Now that the SDK is installed, you can test the installation by running the pre-built examples:
$ cd ~/workspace/ncsdk $ make examples
This may take about five minutes to run and you’ll see a lot of output (not shown in the block above).
If you don’t see error messages while all the examples are running, that is good news. You’ll notice that the Makefile has executed code to go out and download models and weights from Github, and from there it runs mvNCCompile. We’ll learn about mvNCCompile in the next section. I’m impressed with the effort put into the Makefiles by the Movidius team.
Another check (this is the same one we did on the Pi last week):
$ cd ~/workspace/ncsdk/examples/apps $ make all $ cd hello_ncs_py $ python hello_ncs.py Hello NCS! Device opened normally. Goodbye NCS! Device closed normally. NCS device working.
This test ensures that the links to your API and connectivity to the NCS are working properly.
If you’ve made it this far without too much trouble, then congratulations!
Generating Movidius graph files from your own Caffe models
Generating graph files is made quite easy by Intel’s SDK. In some cases you can actually compute the graph using a Pi. Other times, you’ll need a machine with more memory to accomplish the task.
There’s one main tool that I’d like to share with you:
mvNCCompile.
This command line tool supports both TensorFlow and Caffe. It is my hope that Keras will be supported in the future by Intel.
For Caffe, the command line arguments are in the following format (TensorFlow users should refer to the documentation which is similar):
$ mvNCCompile network.prototxt -w network.caffemodel \
-s MaxNumberOfShaves -in InputNodeName -on OutputNodeName \
-is InputWidth InputHeight -o OutputGraphFilename
Let’s review the arguments:
-
network.prototxt
: path/filename of the network file -
-w network.caffemodel
: path/filename of the caffemodel file -
-s MaxNumberOfShaves
: SHAVEs (1, 2, 4, 8, or 12) to use for network layers (I think the default is 12, but the documentation is unclear) -
-in InputNodeNodeName
: you may optionally specify a specific input layer (it would match the name in the prototxt file) -
-on OutputNodeName
: by default the network is processed through the output tensor and this option allows a user to select an alternative end point in the network -
-is InputWidth InputHeight
: the input shape is very important and should match the design of your network -
-o OutputGraphFilename
: if no file/path is specified this defaults to the very ambiguous filename,graph
, in the current working directory
Where’s the batch size argument?
The batch size for the NCS is always 1 and the number of color channels is assumed to be 3.
If you provide command line arguments to
mvNCCompilein the right format with an NCS plugged in, then you’ll be on your way to having a graph file rather quickly.
There’s one caveat (at least from my experience thus far with Caffe files). The
mvNCCompiletool requires that the prototxt be in a specific format.
You might have to modify your prototxt to get the
mvNCCompiletool to work. If you’re having trouble, the Movidius forums may be able to guide you.
Today we’re working with MobileNet Single Shot Detector (SSD) trained with Caffe. The GitHub user, chuanqui305, gets credit for the training the model on the MS-COCO dataset. Thank you chuanqui305!
I have provided chuanqui305’s files in the “Downloads” section. To compile the graph you should execute the following command:
$ mvNCCompile models/MobileNetSSD_deploy.prototxt \
-w models/MobileNetSSD_deploy.caffemodel \
-s 12 -is 300 300 -o graphs/mobilenetgraph
mvNCCompile v02.00, Copyright @ Movidius Ltd 2016
/usr/local/bin/ncsdk/Controllers/FileIO.py:52: UserWarning: You are using a large type. Consider reducing your data sizes for best performance
"Consider reducing your data sizes for best performance\033[0m")
You should expect the Copyright message and possibly additional information or a warning like I encountered above. I procdeded by ignoring the warning without any trouble.
Object detection with the Intel Movidius Neural Compute Stick
Let’s write a real-time object detection script. The script very closely aligns with the non-NCS version that we built in a previous post.
You can find today’s script and associated files in the “Downloads” section of this blog post. I suggest you download the source code and model file if you wish to follow along.
Once you’ve downloaded the files, open
ncs_realtime_objectdetection.py:
# import the necessary packages from mvnc import mvncapi as mvnc from imutils.video import VideoStream from imutils.video import FPS import argparse import numpy as np import time import cv2
We import our packages on Lines 2-8, taking note of the
mvncapi, which is the the Movidius NCS Python API package.
From there we’ll perform initializations:
# initialize the list of class labels our network was trained to
# detect, then generate a set of bounding box colors for each class
CLASSES = ["background", "aeroplane", "bicycle", "bird",
"boat", "bottle", "bus", "car", "cat", "chair", "cow",
"diningtable", "dog", "horse", "motorbike", "person",
"pottedplant", "sheep", "sofa", "train", "tvmonitor"]
COLORS = np.random.uniform(0, 255, size=(len(CLASSES), 3))
# frame dimensions should be sqaure
PREPROCESS_DIMS = (300, 300)
DISPLAY_DIMS = (900, 900)
# calculate the multiplier needed to scale the bounding boxes
DISPLAY_MULTIPLIER = DISPLAY_DIMS[0] // PREPROCESS_DIMS[0]
Our class labels and associated random colors (one random color per class label) are initialized on Lines 12-16.
Our MobileNet SSD requires dimensions of 300×300, but we’ll be displaying the video stream at 900×900 to better visualize the output (Lines 19 and 20).
Since we’re changing the dimensions of the image, we need to calculate the scalar value to scale our object detection boxes (Line 23).
From there we’ll define a
preprocess_imagefunction:
def preprocess_image(input_image):
# preprocess the image
preprocessed = cv2.resize(input_image, PREPROCESS_DIMS)
preprocessed = preprocessed - 127.5
preprocessed = preprocessed * 0.007843
preprocessed = preprocessed.astype(np.float16)
# return the image to the calling function
return preprocessed
The actions made in this pre-process function are specific to our MobileNet SSD model. We resize, perform mean subtraction, scale the image, and convert it to
float16format (Lines 27-30).
Then we return the
preprocessedimage to the calling function (Line 33).
To learn more about pre-processing for deep learning, be sure to refer to my book, Deep Learning for Computer Vision with Python.
From there we’ll define a
predictfunction:
def predict(image, graph):
# preprocess the image
image = preprocess_image(image)
# send the image to the NCS and run a forward pass to grab the
# network predictions
graph.LoadTensor(image, None)
(output, _) = graph.GetResult()
# grab the number of valid object predictions from the output,
# then initialize the list of predictions
num_valid_boxes = output[0]
predictions = []
This
predictfunction applies to users of the Movidius NCS and it is largely based on the Movidius NC App Zoo GitHub example — I made a few minor modifications.
The function requires an
imageand a
graphobject (which we’ll instantiate later).
First we pre-process the image (Line 37).
From there, we run a forward pass through the neural network utilizing the NCS while grabbing the predictions (Lines 41 and 42).
Then we extract the number of valid object predictions (
num_valid_boxes) and initialize our
predictionslist (Lines 46 and 47).
From there, let’s loop over the valid results:
# loop over results
for box_index in range(num_valid_boxes):
# calculate the base index into our array so we can extract
# bounding box information
base_index = 7 + box_index * 7
# boxes with non-finite (inf, nan, etc) numbers must be ignored
if (not np.isfinite(output[base_index]) or
not np.isfinite(output[base_index + 1]) or
not np.isfinite(output[base_index + 2]) or
not np.isfinite(output[base_index + 3]) or
not np.isfinite(output[base_index + 4]) or
not np.isfinite(output[base_index + 5]) or
not np.isfinite(output[base_index + 6])):
continue
# extract the image width and height and clip the boxes to the
# image size in case network returns boxes outside of the image
# boundaries
(h, w) = image.shape[:2]
x1 = max(0, int(output[base_index + 3] * w))
y1 = max(0, int(output[base_index + 4] * h))
x2 = min(w, int(output[base_index + 5] * w))
y2 = min(h, int(output[base_index + 6] * h))
# grab the prediction class label, confidence (i.e., probability),
# and bounding box (x, y)-coordinates
pred_class = int(output[base_index + 1])
pred_conf = output[base_index + 2]
pred_boxpts = ((x1, y1), (x2, y2))
# create prediciton tuple and append the prediction to the
# predictions list
prediction = (pred_class, pred_conf, pred_boxpts)
predictions.append(prediction)
# return the list of predictions to the calling function
return predictions
Okay, so the above code might look pretty ugly. Let’s take a step back. The goal of this loop is to append prediction data to our
predictionslist in an organized fashion so we can use it later. This loop just extracts and organizes the data for us.
But what in the world is the
base_index?
Basically, all of our data is stored in one long array/list (
output). Using the
box_index, we calculate our
base_indexwhich we’ll then use (with more offsets) to extract prediction data.
I’m guessing that whoever wrote the Python API/bindings is a C/C++ programmer. I might have opted for a different way to organize the data such as a list of tuples like we’re about to construct.
Why are we ensuring values are finite on Lines 55-62?
This ensures that we have valid data. If it’s invalid we
continueback to the top of the loop (Line 63) and try another prediction.
What is the format of the
outputlist?
The output list has the following format:
-
output[0]
: we extracted this value on Line 46 asnum_valid_boxes
-
output[base_index + 1]
: prediction class index -
output[base_index + 2]
: prediction confidence -
output[base_index + 3]
: object boxpoint x1 value (it needs to be scaled) -
output[base_index + 4]
: object boxpoint y1 value (it needs to be scaled) -
output[base_index + 5]
: object boxpoint x2 value (it needs to be scaled) -
output[base_index + 6]
: object boxpoint y2 value (it needs to be scaled)
Lines 68-82 handle building up a single prediction tuple. The prediction consists of:
(pred_class, pred_conf, pred_boxpts)and we append the
predictionto the
predictionslist on Line 83.
After we’re done looping through the data, we
returnthe
predictionslist to the calling function on Line 86.
From there, let’s parse our command line arguments:
# construct the argument parser and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-g", "--graph", required=True,
help="path to input graph file")
ap.add_argument("-c", "--confidence", default=.5,
help="confidence threshold")
ap.add_argument("-d", "--display", type=int, default=0,
help="switch to display image on screen")
args = vars(ap.parse_args())
We parse our three command line arguments on Lines 89-96.
We require the path to our graph file. Optionally we can specify a different confidence threshold or display the image to the screen.
Next, we’ll connect to the NCS and load the graph file onto it:
# grab a list of all NCS devices plugged in to USB
print("[INFO] finding NCS devices...")
devices = mvnc.EnumerateDevices()
# if no devices found, exit the script
if len(devices) == 0:
print("[INFO] No devices found. Please plug in a NCS")
quit()
# use the first device since this is a simple test script
# (you'll want to modify this is using multiple NCS devices)
print("[INFO] found {} devices. device0 will be used. "
"opening device0...".format(len(devices)))
device = mvnc.Device(devices[0])
device.OpenDevice()
# open the CNN graph file
print("[INFO] loading the graph file into RPi memory...")
with open(args["graph"], mode="rb") as f:
graph_in_memory = f.read()
# load the graph into the NCS
print("[INFO] allocating the graph on the NCS...")
graph = device.AllocateGraph(graph_in_memory)
The above block is identical to last week, so I’m not going to review it in detail. Essentially we’re checking that we have an available NCS, connecting, and loading the graph file on it.
The result is a
graphobject which we use in the predict function above.
Let’s kick off our video stream:
# open a pointer to the video stream thread and allow the buffer to
# start to fill, then start the FPS counter
print("[INFO] starting the video stream and FPS counter...")
vs = VideoStream(usePiCamera=True).start()
time.sleep(1)
fps = FPS().start()
We start the camera
VideoStream, allow our camera to warm up, and our instantiate our FPS counter.
Now let’s process the camera feed frame by frame:
# loop over frames from the video file stream
while True:
try:
# grab the frame from the threaded video stream
# make a copy of the frame and resize it for display/video purposes
frame = vs.read()
image_for_result = frame.copy()
image_for_result = cv2.resize(image_for_result, DISPLAY_DIMS)
# use the NCS to acquire predictions
predictions = predict(frame, graph)
Here we’re reading a frame from the video stream, making a copy (so we can draw on it later), and resizing it (Lines 135-137).
We then send the frame through our object detector which will return
predictionsto us.
Let’s loop over the
predictionsnext:
# loop over our predictions
for (i, pred) in enumerate(predictions):
# extract prediction data for readability
(pred_class, pred_conf, pred_boxpts) = pred
# filter out weak detections by ensuring the `confidence`
# is greater than the minimum confidence
if pred_conf > args["confidence"]:
# print prediction to terminal
print("[INFO] Prediction #{}: class={}, confidence={}, "
"boxpoints={}".format(i, CLASSES[pred_class], pred_conf,
pred_boxpts))
Looping over the
predictions, we first extract the class, confidence and boxpoints for the object (Line 145).
If the
confidenceis above the threshold, we print the prediction to the terminal and check if we should display the image on the screen:
# check if we should show the prediction data
# on the frame
if args["display"] > 0:
# build a label consisting of the predicted class and
# associated probability
label = "{}: {:.2f}%".format(CLASSES[pred_class],
pred_conf * 100)
# extract information from the prediction boxpoints
(ptA, ptB) = (pred_boxpts[0], pred_boxpts[1])
ptA = (ptA[0] * DISP_MULTIPLIER, ptA[1] * DISP_MULTIPLIER)
ptB = (ptB[0] * DISP_MULTIPLIER, ptB[1] * DISP_MULTIPLIER)
(startX, startY) = (ptA[0], ptA[1])
y = startY - 15 if startY - 15 > 15 else startY + 15
# display the rectangle and label text
cv2.rectangle(image_for_result, ptA, ptB,
COLORS[pred_class], 2)
cv2.putText(image_for_result, label, (startX, y),
cv2.FONT_HERSHEY_SIMPLEX, 1, COLORS[pred_class], 3)
If we’re displaying the image, we first build a
labelstring which will contain the class name and confidence in percentage form (Lines 160-161).
From there we extract the corners of the rectangle and calculate the position for our
labelrelative to those points (Lines 164-168).
Finally, we display the rectangle and text label on the screen. If there are multiple objects of the same class in the frame, the boxes and labels will have the same color.
From there, let’s display the image and update our FPS counter:
# check if we should display the frame on the screen
# with prediction data (you can achieve faster FPS if you
# do not output to the screen)
if args["display"] > 0:
# display the frame to the screen
cv2.imshow("Output", image_for_result)
key = cv2.waitKey(1) & 0xFF
# if the `q` key was pressed, break from the loop
if key == ord("q"):
break
# update the FPS counter
fps.update()
# if "ctrl+c" is pressed in the terminal, break from the loop
except KeyboardInterrupt:
break
# if there's a problem reading a frame, break gracefully
except AttributeError:
break
Outside of the prediction loop, we again make a check to see if we should display the frame to the screen. If so, we show the frame (Line 181) and wait for the “q” key to be pressed if the user wants to quit (Lines 182-186).
We update our frames per second counter on Line 189.
From there, we’ll most likely continue to the top of the frame-by-frame loop to complete the process again.
If the user happened to press “ctrl+c” in the terminal or if there’s a problem reading a frame, we break out of the loop.
# stop the FPS counter timer
fps.stop()
# destroy all windows if we are displaying them
if args["display"] > 0:
cv2.destroyAllWindows()
# stop the video stream
vs.stop()
# clean up the graph and device
graph.DeallocateGraph()
device.CloseDevice()
# display FPS information
print("[INFO] elapsed time: {:.2f}".format(fps.elapsed()))
print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))
This last code block handles some housekeeping (Lines 200-211) and finally prints the elapsed time and the frames per second pipeline information to the screen. This information allows us to benchmark our script.
Movidius NCS object detection results
Let’s run our real-time object detector with the NCS using the following command:
$ python ncs_realtime_objectdetection.py --graph graph --display 1
Prediction results will be printed in the terminal and the image will be displayed on our Raspberry Pi monitor.
Below I have included an example GIF animation of shooting a video with a smartphone and then post-processing it on the Raspberry Pi:
Thank you to David McDuffee for shooting these example clips so I could include it!
Here’s an example video of the system in action recorded with a Raspberry Pi:
A big thank you to David Hoffman for demoing the Raspberry Pi + NCS in action.
Note: As some of you know, this past week I was taking care of a family member who is recovering from emergency surgery. While I was able to get the blog post together, I wasn’t able to shoot the example videos. A big thanks to both David Hoffman and David McDuffee for gathering great examples making today’s post possible!
And here’s a table of results:
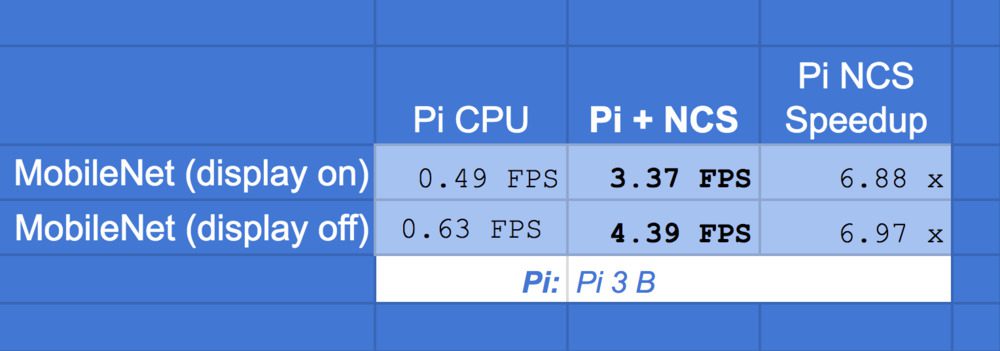
Figure 10: Object detection results on the Intel Movidius Neural Comput Stick (NCS) when compared to the Pi CPU. The NCS helps the Raspberry Pi to achieve a ~6.88x speedup.
The Movidius NCS can propel the Pi to a ~6.88x speedup over the standard CPU object detection! That’s progress.
I reported results with the display option being “on” as well as “off”. As you can see, displaying on the screen slows down the FPS by about 1 FPS due to the OpenCV drawing text/boxes as well as highgui overhead. The reason I reported both this week is so that you’ll have a better idea of what to expect if you’re using this platform and performing object detection without the need for a display (such as in a robotics application).
Note: Optimized OpenCV 3.3+ (with the DNN module) installations will have faster FPS on the Pi CPU (I reported 0.9 FPS previously). To install OpenCV with NEON and VFP3 optimizations just read this previous post. I’m not sure if the version of OpenCV 2.4 that gets installed with the Movidius toolchain contains these optimizations which is one reason why I reported the non-optimized 0.49 FPS metric in the table.
I’ll wrap up this section by saying that it is possible give the illusion of faster FPS with threading if you so wish. Check out this previous post and implement the strategy into
ncs_realtime_objectdetection.pythat we reviewed today.
Frequently asked questions (FAQs)
In this section I detail the answers to Frequently Asked Questions regarding the NCS.
Why does my Movidius NCS continually disconnect from my VM? It appears to be connected, but then when I run ‘make examples’ as instructed above, I see connectivity error messages. I’m running macOS and using a VM.
You must use the VirtualBox Extension Pack and add two USB device filters specifically for the Movidius. Please refer to the USB passthrough settings above.
No predictions are being made on the video — I can see the video on the screen, but I don’t see any error messages or stacktrace. What might be going wrong?
This is likely due to an error in pre-processing.
Be sure your pre-processing function is correctly performing resizing and normalization.
First, the dimensions of the pre-processed image must match the model exactly. For the MobileNet SSD that I’m working with, it is 300×300.
Second, you must normalize the input via mean subtraction and scaling.
I just bought an NCS and want to run the example on my Pi using my HDMI monitor and a keyboard/mouse. How do I access the USB ports that the NCS is blocking?
It seems a bit of poor design that the NCS blocks adjacent USB ports. The only solution I know of is to buy a short extension cable such as this 6in USB 3.0 compatible cable on Amazon — this will give more space around the other three USB ports.
Of course, you could also take your NCS to a machine shop and mill down the heatsink, but that wouldn’t be good for your warranty or cooling purposes.
How do I install the Python bindings to the NCS SDK API in a virtual environment?
Quite simply: you can’t.
Install the SDK on an isolated computer or VM.
For your Pi, install the SDK API-only mode on a separate micro SD card than the one you currently use for everyday use.
I have errors when running ‘mvNCCompile’ on my models. What do you recommend?
The Movidius graph compiling tool, mvNCCompile, is very particular about the input files. Oftentimes for Caffe, you’ll need to modify the .prototxt file. For TensorFlow I’ve seen that the filenames themselves need to be in a particular format.
Generally it is a simple change that needs to be made, but I don’t want to lead you in the wrong direction. The best resource right now is the Movidius Forums.
In the future, I may update these FAQs and the Generating Movidius graph files from your own Caffe models section with guidelines or a link to Intel documentation.
I’m hoping that the Movidius team at Intel can improve their graph compiler tool as well.
What’s next?
If you’re looking to perform image classification with your NCS, then refer to last week’s blog post.
Let me know what you’re looking to accomplish with a Movidius NCS and maybe I’ll turn the idea into a blog post.
Be sure to check out the Movidius blog and TopCoder Competition as well.
Movidus blog on GitHub
The Movidius team at Intel has a blog where you’ll find additional information:
The GitHub community surrounding the Movidius NCS is growing. I recommend that you search for Movidius projects using the GitHub search feature.
Two official repos that you should watch are (click the “watch” button on to be informed of updates):
TopCoder Competition
Figure 11: Earn up to $8,000 with the Movidius NCS on TopCoder.
Are you interested earning up to $8,000?
Intel is sponsoring a competition on TopCoder.
There are $20,000 in prizes up for grabs (first place wins $8,000)!
Registration and submission closes on February 26, 2018. That is next Monday, so don’t waste any time!
Keep track of the leaderboard and standings!
Summary
Today, we answered PyImageSearch reader, Danielle’s questions. We learned how to:
- Install the SDK in a VM so she can use her Mac.
- Generate Movidius graph files from Caffe models.
- Perform object detection with the Raspberry Pi and NCS.
We saw that MobileNet SSD is >6.8x faster on a Raspberry Pi when using the NCS.
The Movidius NCS is capable of running many state-of-the-art networks and is a great value at less than $100 USD. You should consider purchasing one if you want to deploy it in a project or if you’re just yearning for another device to tinker with. I’m loving mine.
There is a learning curve, but the Movidius team at Intel has done a decent job breaking down the barrier to entry with working Makefiles on GitHub.
There is of course room for improvement, but nobody said deep learning was easy.
I’ll wrap today’s post by asking a simple question:
Are you interested in learning the fundamentals of deep learning, how to train state-of-the-art networks from scratch, and discovering my handpicked best practices?
If that sounds good, then you should definitely check out my latest book, Deep Learning for Computer Vision with Python. It is jam-packed with practical information and deep learning code that you can use in your own projects.
Downloads:
The post Real-time object detection on the Raspberry Pi with the Movidius NCS appeared first on PyImageSearch.
from PyImageSearch http://ift.tt/2HuPhIH
via IFTTT
Alcoholics Anonymous Leather Big Book Cover by t
Some members of AA never read from The Big Book. $22. Written by Bill W. Download the app and start listening to Alcoholics Anonymous Big Book (2nd Edition) today - Free with a 30 day Trial! Keep your audiobook forever, even if you cancel. "Bill W. Francis Prayer Cover$20. Holder GIANT PRINT ...
from Google Alert - anonymous http://ift.tt/2ET5xF9
via IFTTT
from Google Alert - anonymous http://ift.tt/2ET5xF9
via IFTTT
Anonymous KLM AmsterdamBatavia 2x per week Travel Posters
151 Anonymous Onze Vloot € 1. 484 Satomi Cote D'Azur € 1. 800. | See more ideas about Vintage airline, Vintage travel posters and Posters. | See more ideas about Air travel, Vintage travel posters and Netherlands. Dec 6, 2015 It's a display that travel agents or ticket offices could put out in their ...
from Google Alert - anonymous http://ift.tt/2sByfp7
via IFTTT
from Google Alert - anonymous http://ift.tt/2sByfp7
via IFTTT
Store Manager
View details and apply for this store manager job in Greater Manchester with Anonymous on RetailChoice. We are looking for an experienced Restaurant Manager to join a large quick service restaurant in the Greater Manchester Area.
from Google Alert - anonymous http://ift.tt/2Fhj2wc
via IFTTT
from Google Alert - anonymous http://ift.tt/2Fhj2wc
via IFTTT
Anonymous communication meaning
Anonymous communication meaning. Please Anonymous. An anonymous communications system is technology that conceals a user's IP address from the server hosting the website visited by the user. Define anonym. Poor Communication How to Use Anonymous Call Rejection You must activate ...
from Google Alert - anonymous http://ift.tt/2Hvd8In
via IFTTT
from Google Alert - anonymous http://ift.tt/2Hvd8In
via IFTTT
Human resource manager
Apply for the Human resource manager vacancy at Anonymous Employer today! Subscribe to alerts for similar jobs from top companies and employers.
from Google Alert - anonymous http://ift.tt/2sL0ORd
via IFTTT
from Google Alert - anonymous http://ift.tt/2sL0ORd
via IFTTT
Authentication defaults to anonymous. Basic cr...
HI , >>When I check the dialog box for credentials, 'Anonymous' is selected. I switch it to 'Basic' and include username and password but when.
from Google Alert - anonymous http://ift.tt/2C85qVp
via IFTTT
from Google Alert - anonymous http://ift.tt/2C85qVp
via IFTTT
Galaxy Formation in a Magnetic Universe

How did we get here? We know that we live on a planet orbiting a star orbiting a galaxy, but how did all of this form? To understand details better, astrophysicists upgraded the famous Illustris Simulation into IllustrisTNG -- now the most sophisticated computer model of how galaxies evolved in our universe. Specifically, this featured video tracks magnetic fields from the early universe (redshift 5) until today (redshift 0). Here blue represents relatively weak magnetic fields, while white depicts strong. These B fields are closely matched with galaxies and galaxy clusters. As the simulation begins, a virtual camera circles the virtual IllustrisTNG universe showing a young region -- 30-million light years across -- to be quite filamentary. Gravity causes galaxies to form and merge as the universe expands and evolves. At the end, the simulated IllustrisTNG universe is a good statistical match to our present real universe, although some interesting differences arise -- for example a discrepancy involving the power in radio waves emitted by rapidly moving charged particles. via NASA http://ift.tt/2CuxNZz
Sunday, February 18, 2018
Anonymous user 0656aa
Name, Anonymous user 0656aa. User since, Oct. 7, 2017. Number of add-ons developed, 1 add-on. Average rating of developer's add-ons, Not yet rated ...
from Google Alert - anonymous http://ift.tt/2sFRihW
via IFTTT
from Google Alert - anonymous http://ift.tt/2sFRihW
via IFTTT
Subscribe to:
Posts (Atom)